





























8 - 25
8. TROUBLESHOOTING
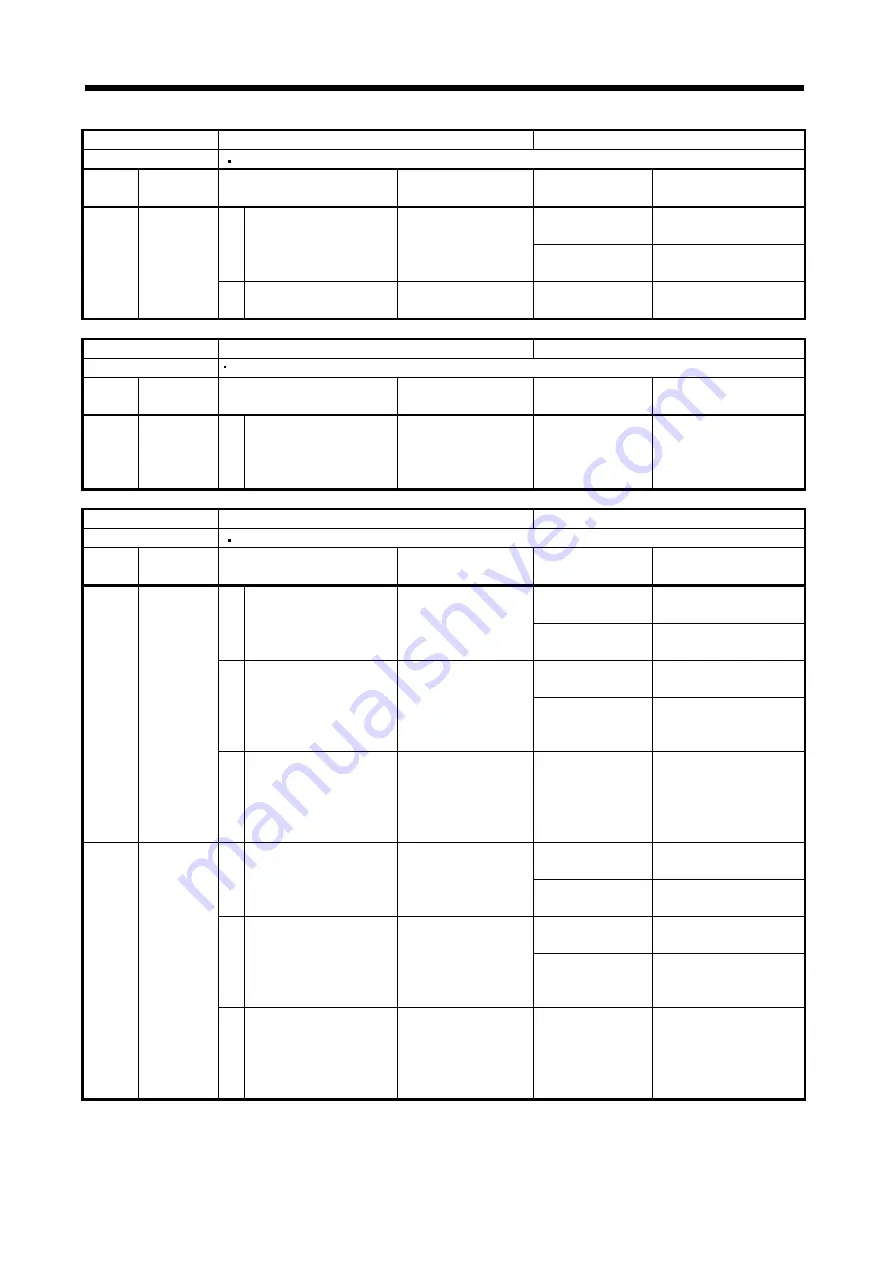
Alarm No.: A.96
Name: Home position setting error
The servo motor stops.
Description
Incorrectly finished after home position return operation.
Detailed
display
Detailed
Name
Cause
Checking method
Result
Action
96.2
Speed
command
not
converged
1) The speed command does
not become "0" after home
position return.
Check the speed
command value after
home position return.
Speed Command
outputting
Set the speed command
to "0".
Speed Command
not outputting
Check 2).
2) The creep speed is too
fast.
Check the creep
speed.
The creep speed is
too fast.
Reduce the creep speed.
Alarm No.: A.97
Name: Program operation disabled
The servo motor does not stop.
Warning contents
The program operation was performed during program operation disabled status.
Detailed
display
Detailed
Name
Cause
Checking method
Result
Action
97.1
Program
operation
disabled
1) The program was started
without switching OFF/ON
the power of the servo
amplifier.
Check if the power of
the servo amplifier is
switched OFF/ON.
The power of the
servo amplifier is
not switched
OFF/ON.
Switch OFF/ON the power
of the servo amplifier.
Alarm No.: A.98
Name: Software limit warning
The servo motor stops.
Description
The current position reached the software stroke limit (set in the parameter No. PE16 to PE19).
Detailed
display
Detailed
Name
Cause
Checking method
Result
Action
98.1
Reached the
software limit
at the
forward
rotation
1) Software limit was set
within the actual movable
range.
Check the set value of
the parameter.
Within the movable
range
Set the parameter
correctly.
Outside the
movable range
Check 2).
2) Point table/program with
the position data in excess
of the software limit at the
forward rotation was
executed.
1. Check the set value
of the point
table/program.
2. Check the operation
method.
Within the movable
range
Create the point table/
program correctly.
In manual operation Check 3).
3) Software limit at the
forward rotation side was
reached during JOG
operation or manual pulse
generator operation.
Check if the software
limit at the forward
rotation side is
reached.
Software limit at the
forward rotation side
is reached.
Perform operation within
software limit range.
98.2
Reached the
software limit
at the
reverse
rotation side
1) Software limit was set
within the actual movable
range.
Check the set value of
the parameter.
Within the movable
range
Set the parameter
correctly.
Outside the
movable range
Check 2).
2) Point table/program with
the position data in excess
of the software limit at the
reverse rotation was
executed.
1. Check the set value
of the point
table/program.
2. Check the operation
method.
Within the movable
range
Create the point table/
program correctly.
In manual operation Check 3).
3) Software limit at the
reverse rotation side was
reached during JOG
operation or manual pulse
generator operation.
Check if the software
limit at the reverse
rotation side is
reached.
Software limit at the
reverse rotation side
is reached.
Perform operation within
software limit range.
Содержание MELSERVO-JN Series
Страница 31: ... 22 MEMO ...
Страница 49: ...2 6 2 INSTALLATION MEMO ...
Страница 181: ...5 30 5 DISPLAY AND OPERATION SECTIONS MEMO ...
Страница 199: ...6 18 6 GENERAL GAIN ADJUSTMENT MEMO ...
Страница 251: ...9 4 9 DIMENSIONS 2 SCR connector system 3M Receptacle 36210 0100PL Shell kit 36310 3200 008 Unit mm 34 8 39 5 22 4 11 0 ...
Страница 303: ...11 46 11 OPTIONS AND PERIPHERAL EQUIPMENT MEMO ...
Страница 351: ...12 48 12 SERVO MOTOR MEMO ...
Страница 445: ...13 94 13 POSITIONING MODE MEMO ...





















































