
















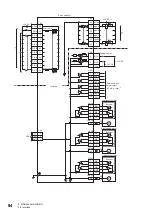




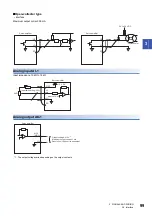








3 SIGNALS AND WIRING
3.6 Interface
91
3
3
SON SON SON
CN3
15
SP2 SP2
16
PC
ST1 RS2
17
TL
ST2 RS1
18
RES RES
19
CR
SP1
41
EM2
42
LSP
43
LSN
44
LOP
45
OPC
12
20
21
LSP
LSN
LOP
DICOM
DICOM
LOP
50
RES
SP1
P
S
T
CN3
46
22
23
24
25
48
49
13
*7*8
*7*8
14
DOCOM
47
DOCOM
INP
SA
ZSP
INP
TLC
RD
ZSP
TLC
ALM
RD
ZSP
TLC
RD
SA
CN3
P
S
T
4
5
6
7
8
9
33
34
CN3
LA
LAR
LB
LBR
LZ
LZR
OP
LG
SDP
SDN
RDP
RDN
LG
CN6
MO1
MO2
LG
3
2
1
CN3
P
T
2
VC
VLA
27
TLA TLA
TC
1
P15R
3
LG
28
LG
30
LG
SD
RS-422/RS-485
CN2
2
4
7
8
MR
MRR
MX
MXR
LG
*3
*1
*1
P
S
T
*1
PP
10
PG
11
NP
35
PP2
37
NP2
38
NG
36
*2
*1
*8
*8
S
29
32
39
40
28
P
S
T
*1
P
S
T
*1
P
S
T
*1
E
M
USB
D+
GND
D-
2
3
5
CN5
MR2
MRR2
MX2
MXR2
CN2L
*4*6
3
2
4
7
8
LG
P
S
T
P
S
T
*1
RA
RA
*3
Servo amplifier
Approx. 6.2 k
Ω
24 V DC
*5
Approx. 6.2 k
Ω
Approx. 4.3 k
Ω
24 V DC
*5
Approx. 1.2 k
Ω
Approx. 100
Ω
Approx. 1.2 k
Ω
Approx. 1.2 k
Ω
Approx. 100
Ω
Approx. 1.2 k
Ω
Differential line
driver output
(35 mA or less)
Isolated
Open-collector output
15 V DC
Analog monitor
Case
Servo motor
Encoder
External encoder
Encoder
± 10 V DC
± 10 V DC
Содержание MELSERVO-J5 MR-J5-G Series
Страница 1: ...MR J5 User s Manual Hardware MR J5 _G_ MR J5W_ _G_ MR J5 _A_ Mitsubishi Electric AC Servo System ...
Страница 2: ......
Страница 473: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 471 12 MEMO ...
Страница 477: ......






































































