


























316
7 ABSOLUTE POSITION DETECTION SYSTEM
7.4 Absolute position detection system via communication [A]
Transfer method
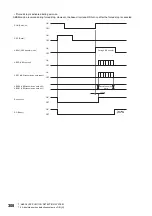
The following shows the procedure for turning on the base circuit again from when the base circuit is in off status because the
SON and EM2 are off, or alarm occurred. In the absolute position detection system, read the current position in the servo
amplifier to the controller using the serial communication command each time RD is turned on. The servo amplifier transmits
the current position at the time of command reception to the controller side. At the same time, this data is set as a position
command value inside the servo amplifier.
■
Sequence processing at power-on
1.
The base circuit turns on after 100 ms.
2.
After the base circuit turns on, RD turns on.
3.
After RD turns on, the controller acquires the absolute position data. Then, give a command pulse to the servo amplifier.
If a command pulse is given before the controller acquires the absolute position data, position mismatch may occur.
■
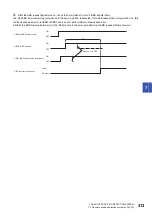
Communication errors
If a communication error occurs between the controller and servo amplifier, the servo amplifier transmits a corresponding
error code.
The descriptions of the error codes are the same as the error codes in the communication function. For details, refer to
"Mitsubishi Electric AC servo protocol" in the following manual.
MR-J5 User's Manual (Function)
If a communication error occurs, execute retry. If the communication does not terminate normally even after retrying several
times, perform error processing.
OFF
100 ms
ON
OFF
ON
OFF
ON
OFF
ON
5 ms
Power supply
SON (Servo-on)
Base circuit
RD (Ready)
Absolute position data
command transmission
Absolute position data
reception
Current position change
Current position
Absolute position
data
Pulse train command
Acquire the absolute position data
within this period.
Содержание MELSERVO-J5 MR-J5-G Series
Страница 1: ...MR J5 User s Manual Hardware MR J5 _G_ MR J5W_ _G_ MR J5 _A_ Mitsubishi Electric AC Servo System ...
Страница 2: ......
Страница 473: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 471 12 MEMO ...
Страница 477: ......







































































