





























Spline interpolation
Appendix-615
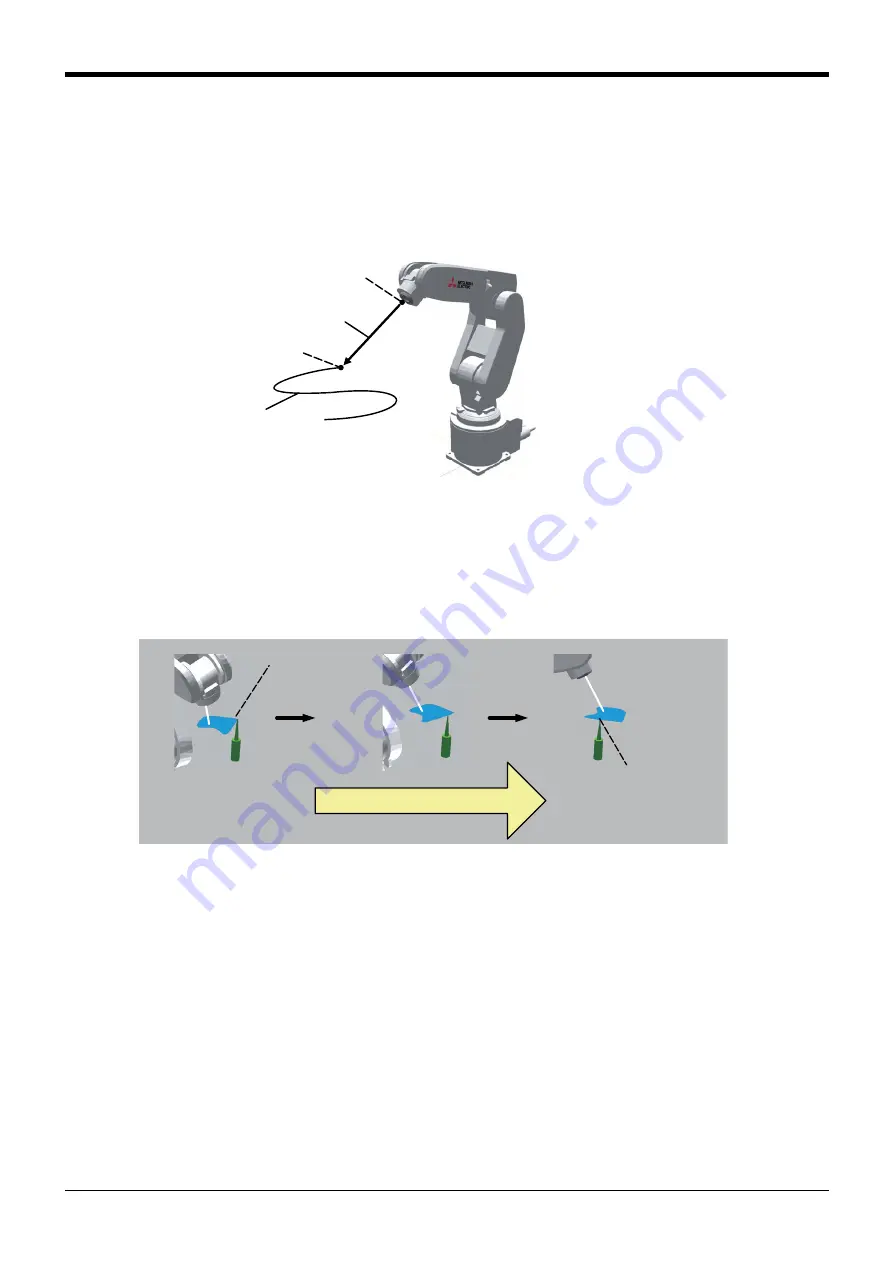
(3) Robot behavior during spline interpolation
• If the robot’s current position and spline interpolation start position differ and spline interpolation is exe-
cuted, the robot will move with linear interpolation to the start position and then will start spline interpolation.
During linear interpolation, the robot moves with the speed designated with Ovrd command, Spd command
and override.
Even with the additional axis, if the current position and start position differ, the robot will move to the start
position.
Fig.7-10:When current position and start position differ (Spline interpolation)
• If the robot’s current position and Ex-T spline interpolation start position differ and Ex-T spline interpolation
is executed, the robot will move with Ex-T linear interpolation to the start position and then will start Ex-T
spline interpolation. During Ex-T linear interpolation, the robot moves with the speed designated with Ovrd
command, Spd command and override.
Even with the additional axis, if the current position and start position differ, the robot will move to the start
position.
Fig.7-11:When current position and start position differ (Ex-T spline interpolation)
• Operation during spline interpolation can be halted with a stop input, etc. When operation is resumed, the
remaining spline interpolation is continued from the halted position.
• If the robot or additional axis is moved with jog operation after the spline interpolation has been halted with
a stop input, etc., the robot will return to the position where spline interpolation was halted before continuing
Current position
Linear interpolation
Start position
Spline interpolation
Current position
Start position
Ex-T linear interpolation





















































