





























5-442
Movement parameter
5Functions set with parameters
Free plane limit
Refer to
This is the overrun limit set on a free plane.
Create a plane with three coordinate points, and set the area that does not include the origin as
the outside-movement area. Up to eight limits can be set using the following three types of
parameters.
SFC*P
* is 1 to 8
Real value 9 Designate three points for creating the plane.
X1,Y1,Z1:Origin position in the plane
X2,Y2,Z2:Position on the X-axis in the plane
X3,Y3,Z3:Position in the positive Y direction of the X-Y plane in
the plane
(X1,Y1,Z1,
X2,Y2,Z2,
X3,Y3,Z3)=0.0,0.0,
0.0,0.0,0.0,0.0,0.0,0
.0,0.0
SFC*ME
* is 1 to 8
Integer 1
Designate the mechanism No. for which the free plane limit is to
be validated.
The mechanism No. is 1 to 3, but normally 1 is set.
0
SFC*AT
* is 1 to 8
Integer 1
Designate the valid/Invalid of the set free plane limit.
0:Invalid
1: Valid (The operable area is the robot coordinate origin side.)
-1: Valid (The operable area is the side where the robot coordi-
nate origin does not exist.)
0(Invalid)
Cylinder limit
*Available soft-
ware versions
and robot
S/W Ver.
F-Q series: R4c or
later
F-D series: S4c or
later
Robot:
RH-3FHR series
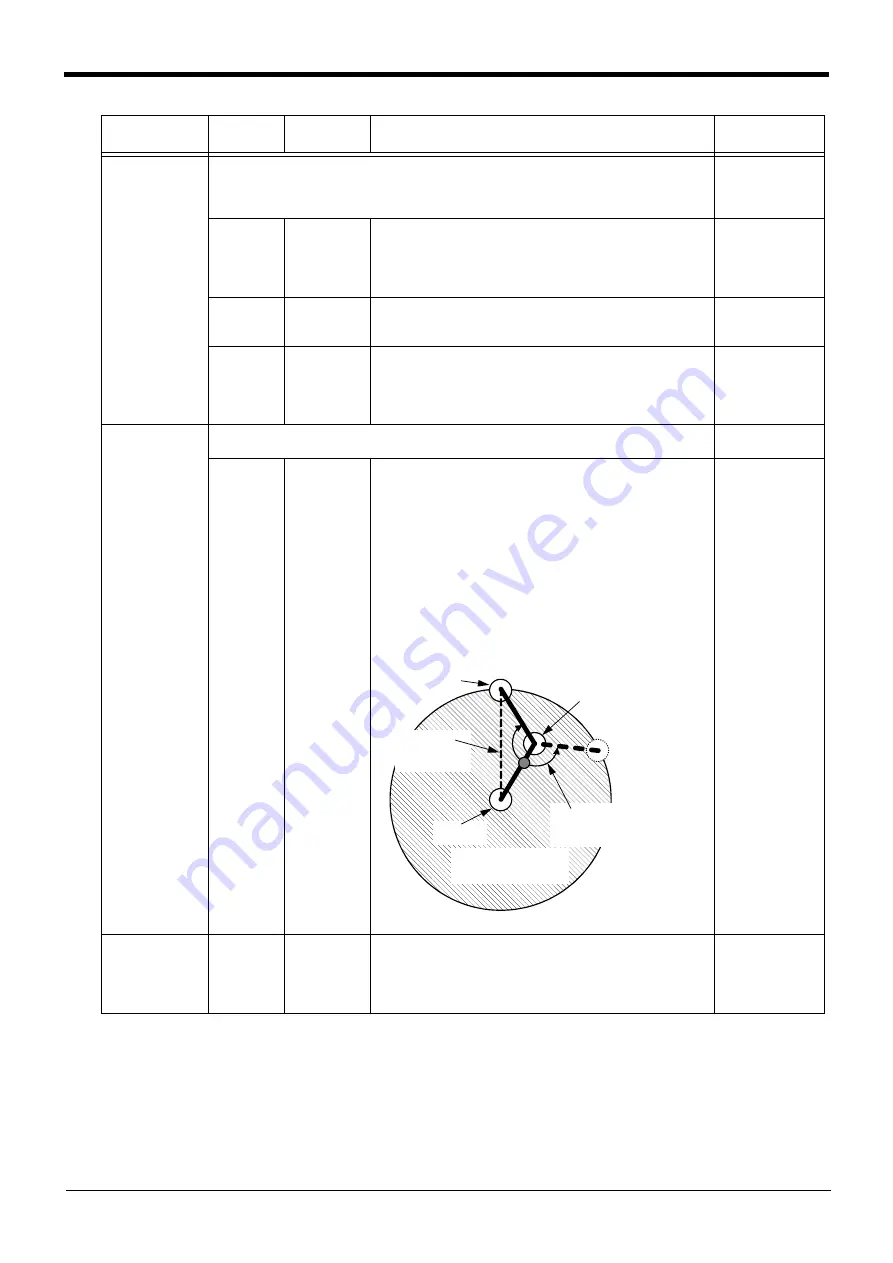
Movement can be limited in the cylinder area centering on the J1 axis.
Set the radius centering on the J1 axis as the parameter
MECAR
Real value 2 Constitution of the parameter : (The radius, J2 axis limitation
angle)
Set the radius as the 1st element. Unit: mm(Valid to two digits
decimal)
If the radius is 0, this function does not function.
If the radius is minus value or the distance can not arrive, the
error occurs at inputting the value.
The cylinder limit makes the limitation of J2 axis operating area
The limitation angle of the J2 axis is calculated automatically and
sets as the 2nd element in the absolute value. (read only, can
not change)
* As compared with the Joint movement range parameter
(MEJAR), limitation of operation is performed in the smaller
one.
Notes) This function is limited to RH-3FHR series.
0, 0
Safe point position JSAFE
Real value 8 Specifies the safe point position. Robot moves to the safe point
position if the robot program executes Mov P_Safe instruction or
receives input of the SAFEPOS signal, which is an external sig-
nal.
(J1,J2,J3,J4,J5,J6,J7,J8) Unit:deg
It varies with models.
Parameter
Parameter
name
No. of arrays
No. of characters
Details explanation
Factory setting
Radius
(Set as the
1st element)
J1 axis
J2 axis
Cylinder area
(Upper face figure)
J2 axis limitation angle
(Sets as the 2nd element
automatically)
Shaft





















































