





























4-190
Detailed explanation of command words
Cnt (Continuous)
[Function]
Designates continuous movement control for interpolation. Shortening of the operating time can be per-
formed by carrying out continuous movement.
[Format]
[Terminology]
<1/0>
Designate the continuous operation or acceleration/deceleration operation mode.
1 : Continuous movement.
0 : Acceleration/deceleration movement.(default value.)
<Numeric value 1> Specify the maximum proximity distance in mm for starting the next interpolation when
changing to a new path segment.
The default value is the position where the acceleration/deceleration is started.
<Numeric value 2> Specify the maximum proximity distance in mm for ending the previous interpolation when
changing to a new path segment.
The default value is the position where the acceleration/deceleration is started.
[Reference Program]
When the maximum neighborhood distance is specified when changing a locus.
1 Cnt 0
' Invalidate Cnt (Continuous movement).
2 Mvs P1
' Operate with acceleration/deceleration
3 Cnt 1
' Validate Cnt (Continuous movement).
(Operate with continuous movement after this step.)
4 Mvs P2
' The connection with the next interpolation is continuous movement.
5 Cnt 1,100,200
' Continuous operation specification at 100 mm on the starting side and at 200
mm on the end side.
6 Mvs P3
' Continuous operation at a specified distance before and after an interpolation.
7 Cnt 1,300
' Continuous operation specification at 300 mm on the starting side and at 300
mm on the end side.
8 Mov P4
' Continuous operation specification at 300 mm on the starting side.
9 Cnt 0
' Invalidate Cnt (Continuous movement).
10 Mov P5
' Operate with acceleration/deceleration
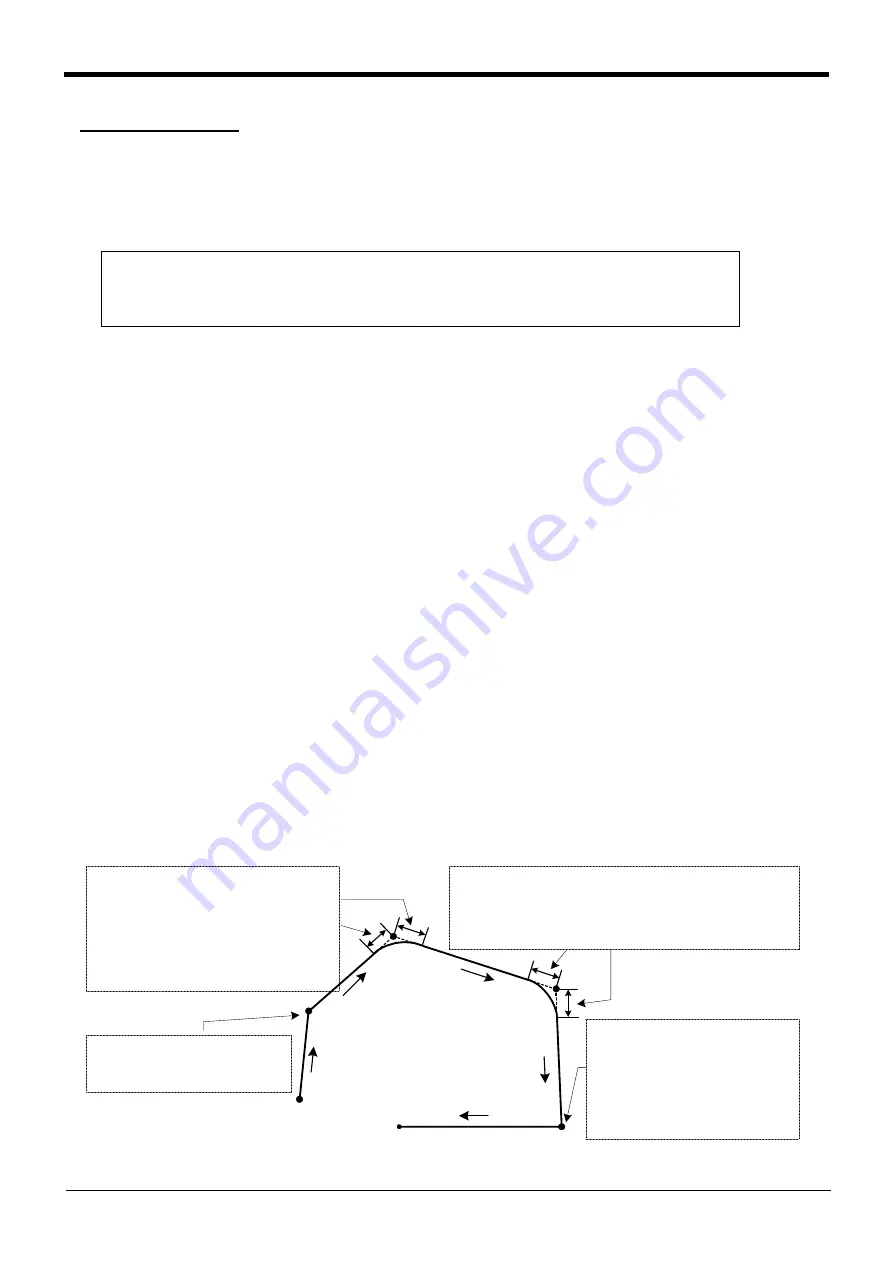
Fig.4-16:Example of continuous path operation
Cnt[] <Continuous movement mode/acceleration/deceleration movement mode>]
[, <Numeric value 1>] [, <Numeric value 2>]
P1
P2
P3
P4
P5
Start position of movement
Although the neighborhood
distance (300 mm) when
moving to P4 has been set,
continuous operation when
moving to P5 has been
canceled. Therefore, it moves to
P4 first, and then moves to P5.
It moves to P1 first and then to
P2 since continuous operation
is not set up.
Continuous operation is performed at
a distance shorter than the smaller of
the neighborhood distance (the initial
setting value in the robot controller)
when moving to P2 and the fulcrum
neighborhood point (100 mm) when
moving to P3.
Continuous operation is performed at a distance
shorter than the smaller of the neighborhood distance
(200 mm) when moving to P3 and the fulcrum
neighborhood point (300 mm) when moving to P4.





















































