





























ACSetup programme
Positioning module IMD20, IMD40
The setting of the regulation parameters can be realised as follows:
y
Load default values.
y
Set test acceleration to maximum acceleration and control the course of speed.
y
Increase kp until a considerable overshooting can be noticed.
y
Increase kd (and / or td) and adapt kp, if necessary, in order to smoothen the course of speed.
Test different target speeds. Normally, td should be set equal to 0. In case of severe faults such
as a toothed belt feed forward, it is sometimes reasonable to increase td instead of kd in order
to achieve a high stability at a low noise level. It has to be taken into account that an increase of
td by 1 leads to a duplication of kd.
y
Set the display to following and change the forward feed factor (and kp), until the following error
becomes minimal. For this, increase the target speed.
lowing
in vary the velocity controller in order to achieve a
ition controller.
y
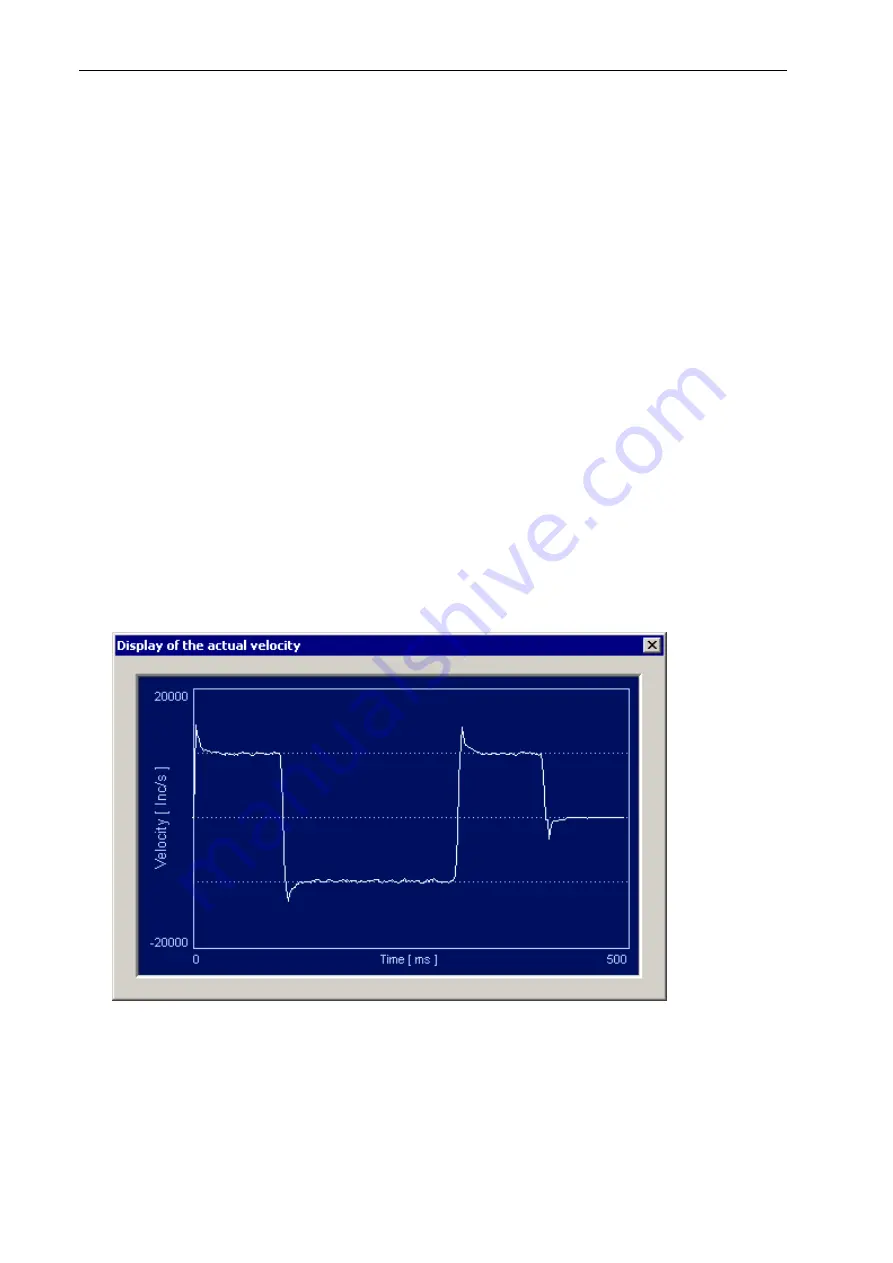
Set the test acceleration to jump and control the transient behaviour of the control cycle even at
higher target speeds (speed display). If the axis switches to a permanent vibration, limit the
following limitation of the velocity controller.
Set the test acceleration to jump and control the transient behaviour of the control cycle even at
higher target speeds (speed display). If the axis switches to a permanent vibration, limit the fol
limitation of the velocity controller.
It can be useful for the optimisation to once aga
better course of speed and a smoother motor operation. During the commissioning in a random
order, however, one has to make sure that the parameters of the velocity controller have to be stored
with <Apply> before every switch-over to the pos
Course of the actual velocity (speed)
70







































































