





























Positioning module IMD20, IMD40
ACSetup programme
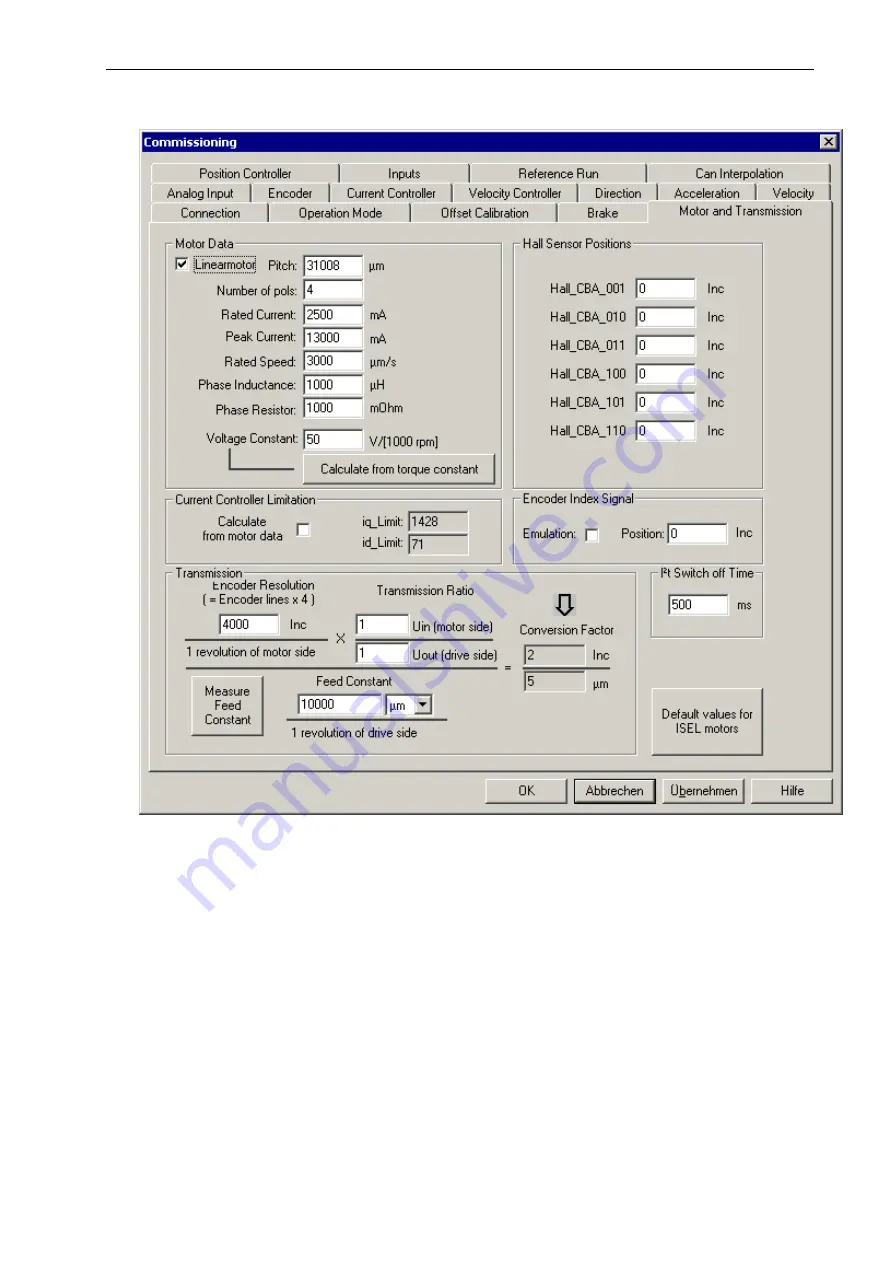
Motor and Transmission dialogue box
In this dialogue box the motor data and transmission data can be input. The current controller
limitaion can be calculated from the motor data (iq_Limit, id_Limit). In the dialogue box "Current
Controller" the current controller limitation can be changed manually.
e formula given, where the encoder resolution, the transmission ratio and the forward
feed constant can be set. However, it is also possible to manually enter any value as conversion
factor, if this is necessary. The units for the speed and acceleration are always derived from the
position unit as Unit/Sec. or Unit/Sec.².
In the example above, a linear axis with a spindle pitch of 10 mm/rev without transmission is
required. The position is to be given in the [µm] unit. Thus, the units for the speed and acceleration
would be µm/sec. or µm/sec.², respectively.
If a rotary axis is used, it is reasonable to use a unit of angular measurement. Here, one can choose
between arc second [“], arc minute [‘] and degree [°].
The conversion of units of length or angular measurement into the internally used Increments format
is made in the drive module. For this, the objects of the Factor Group defined in the CANOpen
specification DS402 are used.
The conversion factor (Position factor 6093
h
) is the value which is used for all conversions. It is
derived from th
61







































































