





























449
Appendix
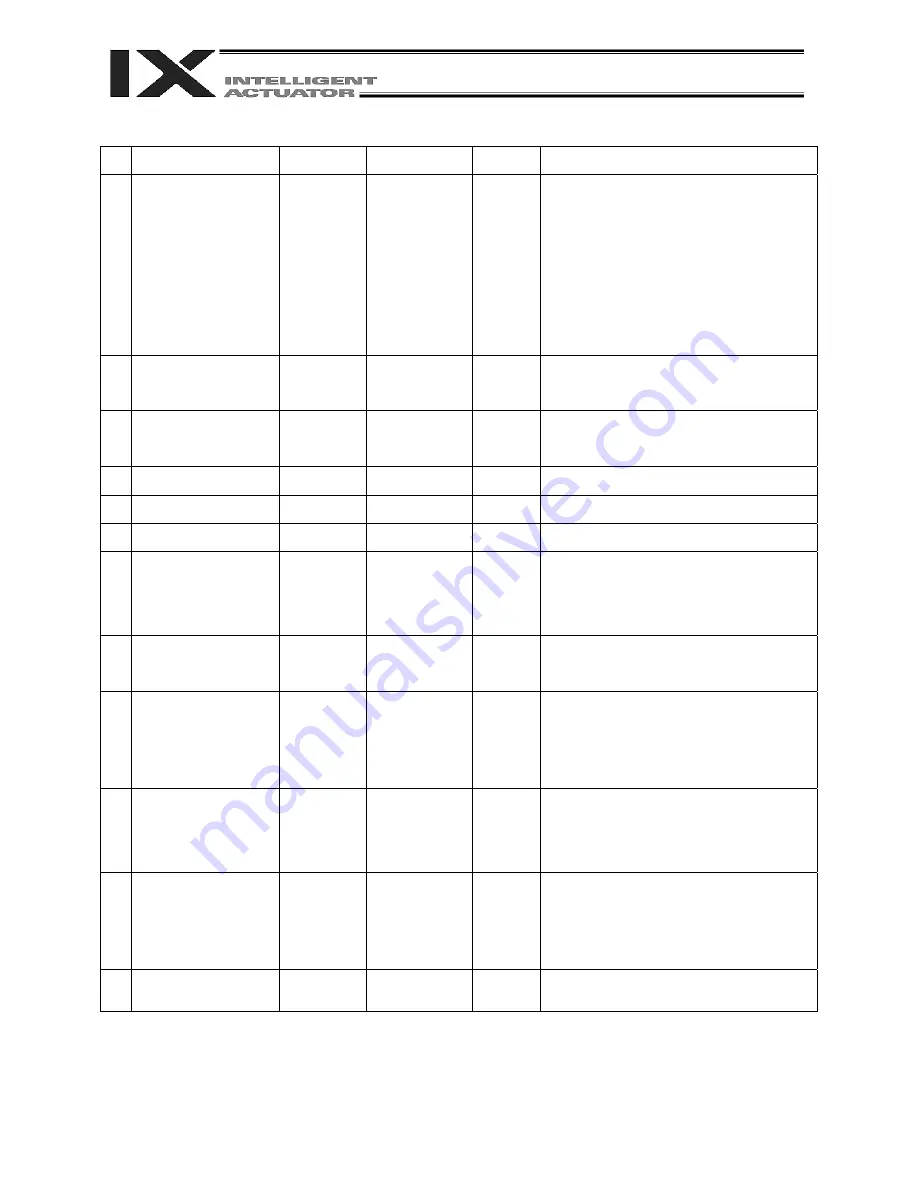
Axis-Specific Parameters
No.
Parameter name
Default value
(Reference)
Input range
Unit
Remarks
14 Home-sensor input
polarity
0
0 ~ 2
Reference only
for SCARA axes
(axes 1 to 4)
0: Not used, 1: Contact a, 2: Contact b
15 Overrun-sensor input
polarity
0
0 ~ 2
Reference only
for SCARA axes
(axes 1 to 4)
0: Not used, 1: Contact a, 2: Contact b
16 Creep-sensor input
polarity
0
0 ~ 2
Reference only
for SCARA axes
(axes 1 to 4)
0: Not used, 1: Contact a, 2: Contact b
17 Default home-sensor
pullout speed at
movement to absolute
reset position/home
return
0,
0,
10,
0,
10,
10
1 ~ 100
Reference only
for SCARA axes
(axes 1 to 4)
mm/sec
18 Creep speed at
movement to absolute
reset position/home
return
0,
0,
100,
0,
100,
100
1 ~ 500
Reference only
for SCARA axes
(axes 1 to 4)
mm/sec End-search speed in the creep sensor non-
detection section when a creep sensor is used.
19 End-search speed at
movement to absolute
reset position/home
return
0,
0,
20,
0,
20,
20
1 ~ 100
Reference only
for SCARA axes
(axes 1 to 4)
mm/sec (Used for SCARA axis 3 (Zc) and linear
movement axes (axes 5 and 6 (6-axis type)))
20 Phase-Z search speed at
movement to absolute
reset position/home
return
0,
0,
3,
0,
3,
3
1 ~ 10
Reference only
for SCARA axes
(axes 1 to 4)
mm/sec Exercise caution, since limitations apply
depending on the read/encoder pulse count.
(Used for SCARA axis 3 (Zc) and linear
movement axes (axes 5 and 6 (6-axis type)))
21 Offset travel distance at
movement to absolute
reset position/home
return
0,
0,
0,
0,
1000,
1000
-99999999 ~
99999999
Reference only
for SCARA axes
(axes 1 to 4)
0.001 mm (Positive value = Direction of moving away from
the end)
(Used for SCARA axis 3 (Zc) and linear
movement axes (axes 5 and 6 (6-axis type)))
(Fixed to “0” for axis 1 (A1c), axis 2 (A2c) and axis
4 (Rc).)
* Point to note when an absolute encoder is used
If a value near an integer multiple of the phase-Z
interval distance (including offset travel distance
0) is set for this parameter, servo lock will occur
over phase Z upon when an absolute reset is
performed. As a result, the coordinates may shift
by the phase-Z interval pulses.
Never set a value near an integer multiple of the
phase-Z interval distance.
(Provide a sufficient margin with respect to the
servo amplitude.)
450
Appendix
Axis-Specific Parameters
No.
Parameter name
Default value
(Reference)
Input range
Unit
Remarks
22 Phase-Z position at home
return
1000,
1000,
500,
1000,
500,
500
0 ~ 99999999
0.001 mm,
0.001 deg
[SCARA axes (axes 1 to 4)]
Minimum allowable value of actual distance
(angle) between [search end (axis 3 (Zc)) or
reference position (eye mark) (axis 1 (A1c), axis 2
(A2c) or axis 4 (Rc))] and phase Z
[Linear movement axes (axes 5 and 6) (6-axis
type)]
With a rotary encoder, this parameter indicates
the minimum allowable actual distance between
the end (mechanical end or LS) and phase Z.
With a linear encoder, it indicates the phase-Z
search limit.
23 Phase Z count per
encoder rotation
1
1 ~ 8
Reference only
for SCARA axes
(axes 1 to 4)
Only “1” can be set, if an absolute encoder is
used.
24 Push-motion stop
confirmation time at
movement to absolute
reset position/home return
700
1 ~ 5000
msec
Used for confirmation of push motion operation at
movement to absolute reset position/home return.
(Used for SCARA axis 3 (Zc) and linear
movement axes (axes 5 and 6) (6-axis type)))
25 Push stop check time at
positioning
500
1 ~ 5000
msec
Used for confirmation of push motion operation
effected by a PUSH command.
26 For future extension
(Change prohibited)
0
0H ~ FFFFFFFFH
27 Maximum motor speed
5000
Reference only
rpm,
mm/sec
For adjustment by the manufacturer
28 Maximum PTP speed
(SCARA axis)/maximum
operating speed of each
axis (linear movement
axis)
480,
480,
1393,
1200,
1000,
1000
1 ~ 9999
mm/sec,
deg/sec
* Maximum SCARA PTP speed for SCARA axes
(axes 1 to 4)
(The maximum SCARA CP speed is set by all-
axis parameter No. 21)
29 VLMX speed of linear
movement axis
0,
0,
0,
0, 1000, 1000
1 ~ 9999
mm/s
* Valid for linear movement axes (axes 5 and 6 (6-
axis type)) only.
(Main application version 0.12 or later)
30 Servo ON check time
150
0 ~ 5000
msec
Brake is installed:
Time after acquisition of
servo ON start response
until start of brake unlock
Brake is not installed: Time after acquisition of
servo ON start response
until transition to
operation-enabled status
31 Offset travel speed at
movement to absolute
reset position/home return
0,
0,
3,
0,
3,
3
1 ~ 500
Reference only
for SCARA axes
(axes 1 to 4)
mm/sec
Used for SCARA axis 3 (Zc) and linear movement
axes (axes 5 and 6 (6-axis type))
32 Actual distance between
phase Z and end
-1
-1 ~ 99999
0.001 mm Absolute distance from the search end. Obtained
automatically if the distance is a negative value.
When multiple actuators are combined, it is
recommended to write the flash ROM after
automatic acquisition.
(Used for SCARA axis 3 (Zc) and linear
movement axes (axes 5 and 6 (6-axis type)))
33 Ideal distance between
phase Z and end
0
0 ~ 99999
0.001 mm Absolute distance from the search end.
(Used for SCARA axis 3 (Zc) and linear
movement axes (axes 5 and 6 (6-axis type)))
453
Содержание X-SEL PX
Страница 1: ...Operation ManualSeventh Edition X SEL Controller PX QX Type Tenth Edition ...
Страница 2: ......
Страница 8: ......
Страница 14: ......
Страница 39: ...15 Part 1 Installation Reference Circuit Diagram Surge absorber Solenoid valve Controller 0 V 15 ...
Страница 410: ...383 Appendix 386 ...
Страница 452: ...425 Appendix 5 428 ...
Страница 559: ......