





















Appendix
A-5
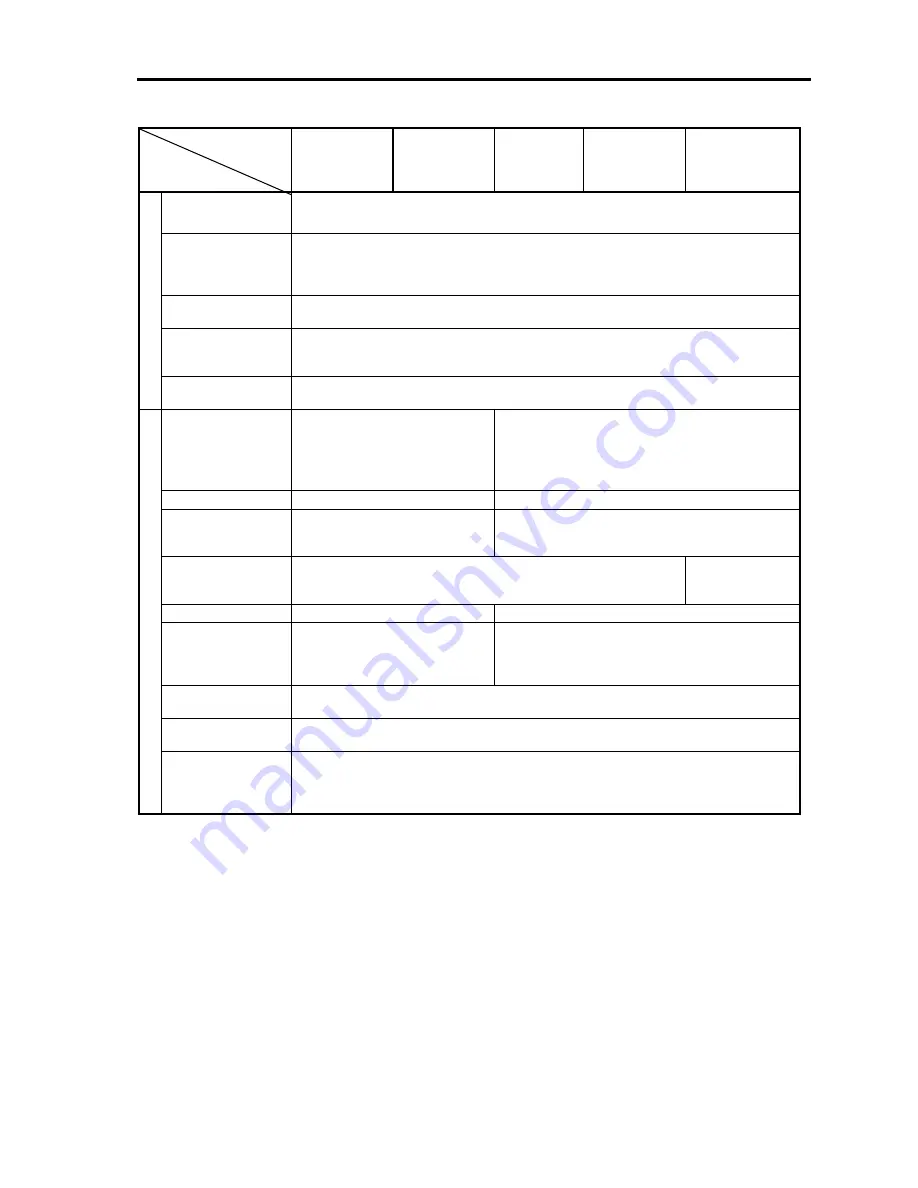
Control specifications table
V/f control
(constant
torque)
V/f control
(variable
torque)
Speed
sensor-less
vector
control
Vector control
with speed
sensor (Note 1)
PM motor control
(Note 2)
Control method
All digital control
Sine wave approximation PWM
Transfer frequency
Mono-sound mode :
1 to 15KHz (1KHz increments)
Soft sound mode :
Average frequency 2.1 to 5KHz
Frequency modulation method
(3 tone modulation, 4 tone modulation)
Output frequency
resolution
0.01Hz
Frequency setting
resolution
0.01Hz (digital)
0.025% (analog)
In respect to maximum frequency
F
re
que
ncy con
tr
o
l
Frequency accuracy
±0.01% (digital) at 25±10°C
±0.1% (analog) at 25±10°C
Voltage/frequency
characteristics
Select randomly from constant
torque, constant output and
reduction torque 3 to 440Hz
range.
Select randomly from constant torque and constant
output 150 to 7200min
–1
(120Hz) range.
Torque boost
Manual/automatic selective
—
Max. torque boost
Max. torque for applicable motor is
output when used with automatic
tuning.
—
Automatic tuning
Automatic measurement of motor constants
Automatic measurement of various parameters
(Measurement time approx. 2 minutes)
—
Starting frequency
Set between 0.1 and 60.0Hz
—
Starting torque
200% or more
(Time to reach using AEG
standard motor at 150%A: approx.
3 seconds)
—
Acceleration/
deceleration time
0.01 to 60000sec
Acceleration/deceleration time × 2, jogging dedicated × 1, program cushion × 8
Acceleration/
deceleration mode
Linear/S-character selective
Co
n
tr
o
l s
p
e
c
if
ic
a
ti
o
n
s
Operation method
3 modes selective
• Forward run/reverse run
• Run stop/forward run reverse run
• Forward run pulse/reverse run pulse/stop
(Note 1) The IM speed detection option PCB is required.
(Note 2) This is for the standard PM motor. The PM speed detection option PCB is required.







































































