





























6. Control Functions and Parameter Settings
6-70
C50-1
Encoder output pulse No. selection
The No. of encoder pulses (2-phase or 1-phase) is set.
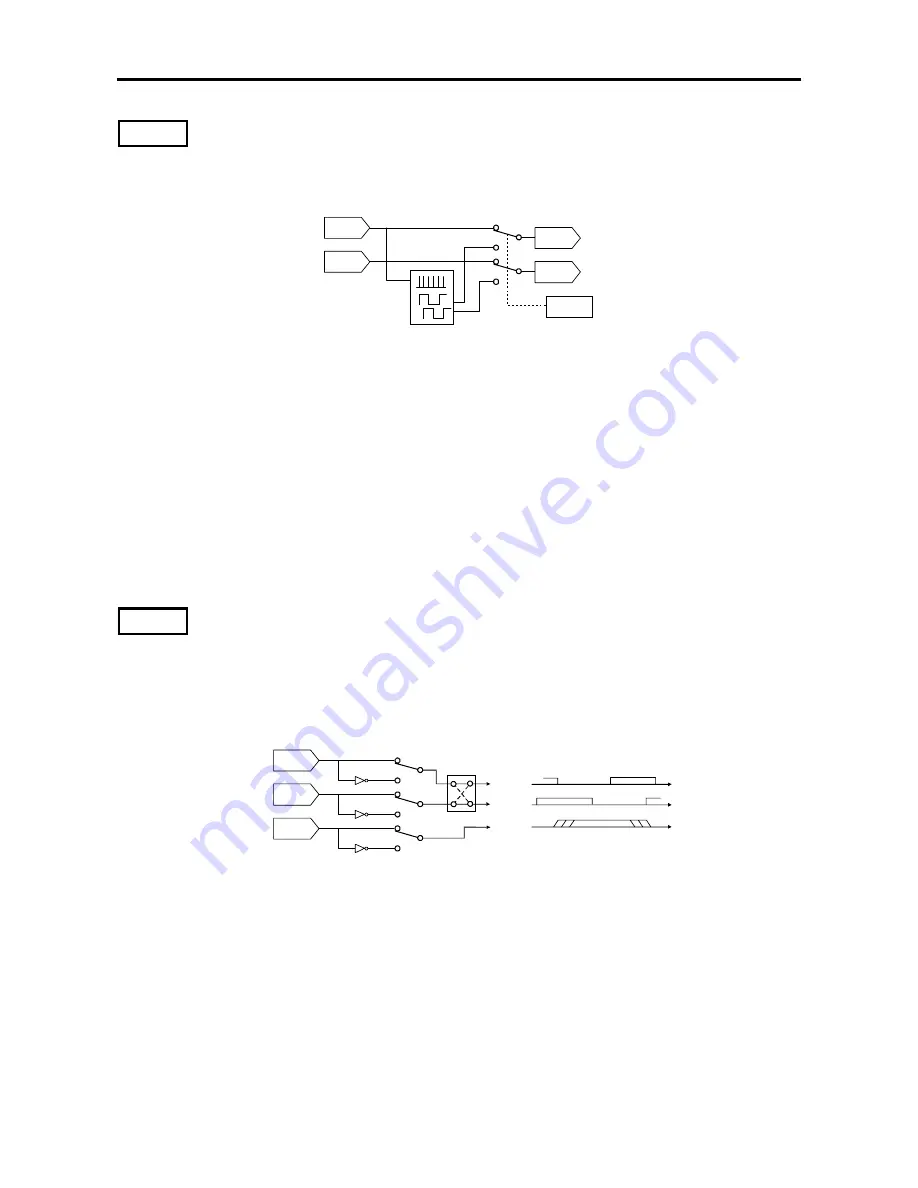
The function to convert a 1-phase pulse signal from a proximity sensor, etc., into a 2-phase
pulse is validated or invalidated.
A -IN
2 -ph ase oscila to r
A -IN 1
B -IN
B -IN 1
C 50-1
=1: This is set when using an encoder that outputs a 2-phase pulse having a 90º phase
difference. The rotation direction can be acknowledge, and the speed can be stable
controlled even at low speeds.
Set the No. of pulses for one phase in the No. of encoder pulses (B01-8).
=2: This is the set when using an encoder that outputs a 1-phase pulse.
Connect the input pulse to only the A phase, and always leave one phase disconnected.
With the 1-phase pulse mode, the rotation direction is recognised as the operating
command direction. The forward run and reverse run directions are not known.
A speed detection error could occur due to the effect of chattering in low speed areas,
so use the a 2-phase encoder when working at low-speed run or forward/reverse run.
(Note) The 1-phase pulse mode cannot be used with the PM control mode.
C50-2
Encoder ABZ pulse type selection
When using the 2-phase pulse, the rotation direction is judged by the advance and delay of
the 2-phase pulse. With the VAT2000, the encoder pulse is defined as shown below during
forward run. (The Z-phase pulse is the zero point position detection and is used only for PM
motor control). When using an encoder with different signal specifications, use this setting to
reverse the signal or convert the signal using the interchange function.
A -IN 1
B -IN 1
R e ve rse
A B in te rch an g e
D u rin g C C W rota tion
A
Z
B
Z-IN
Pulse conversion circuit
Definition of VAT2000 encoder







































































