






















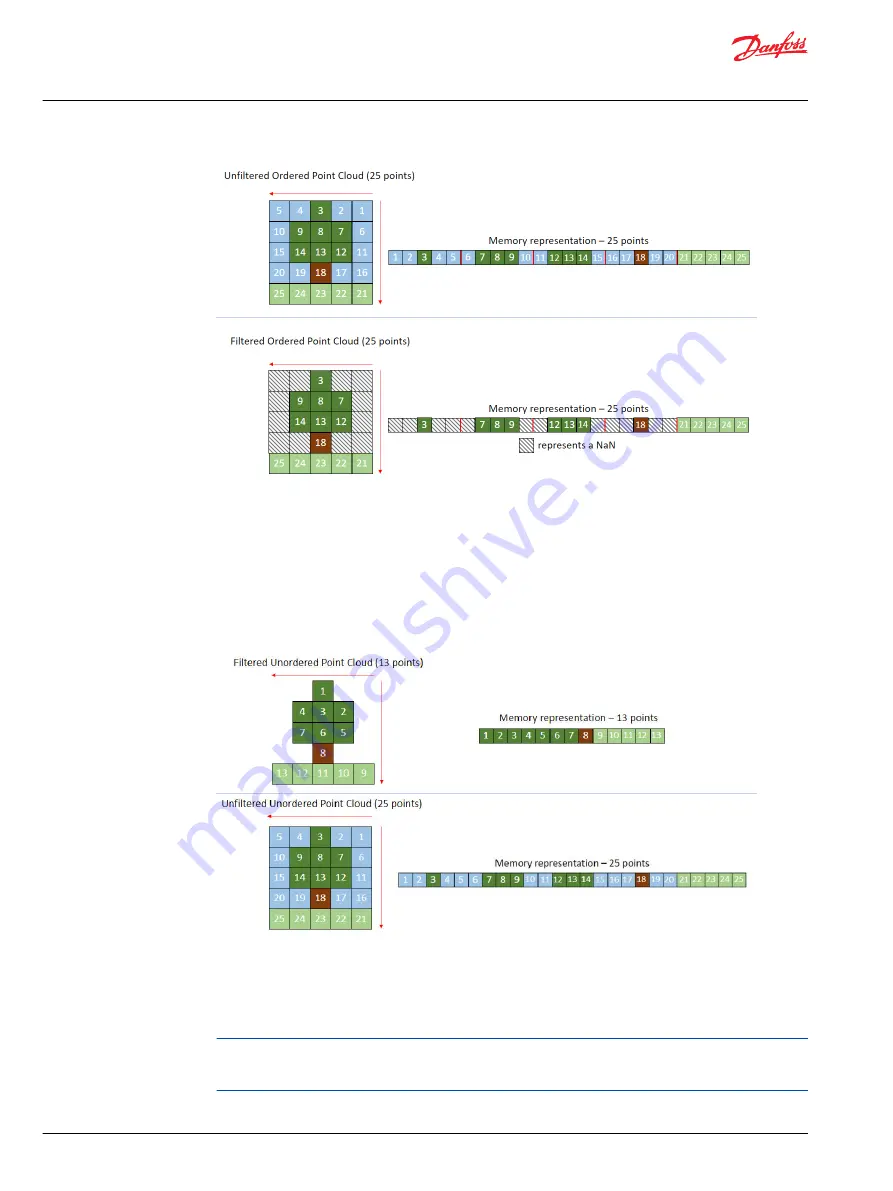
The image above shows point cloud data of 25 LiDAR points seeing a tree. If a LiDAR scans counter-
clockwise, the first point starts in the top right corner. The software stores the points in order and can
recreate the tree image because it knows the location of each point and row. Filtering out the points
detecting the sky frees up memory. The software still recreates the tree image, and the missing data has a
placeholder.
Using ordered point cloud data creates a clear image. To speed up processing times, the data could
change to unordered. LiDARs cannot recreate an image from unordered point cloud data because it no
longer knows the exact coordinates. However, using filtered unordered point cloud data has the fastest
processing times.
The image above shows filtered and unfiltered unordered point cloud data. The LiDAR scans the data
points it detects in the filtered image, but there are not placeholder numbers for the memory to recreate
the image. This combination has the fast processing times. The LiDAR scans unfiltered unordered point
cloud data similar to the ordered point cloud data. However, it cannot recreate the image of the tree
because it does not know the exact coordinates or which row the point belongs.
When setting up a LiDAR, take in as little data as possible to speed up processing times. For example, if
part of a machine blocks the LiDAR's 360 degree view, filter the LiDAR parameters so it only processes
data from the unblocked area. The horizontal area the LiDAR sees is known as the azimuth window.
User Manual
Ouster LiDAR
Introduction
8 |
©
Danfoss | March 2023
AQ404281942428en-000103





















































