





























SMI21
108
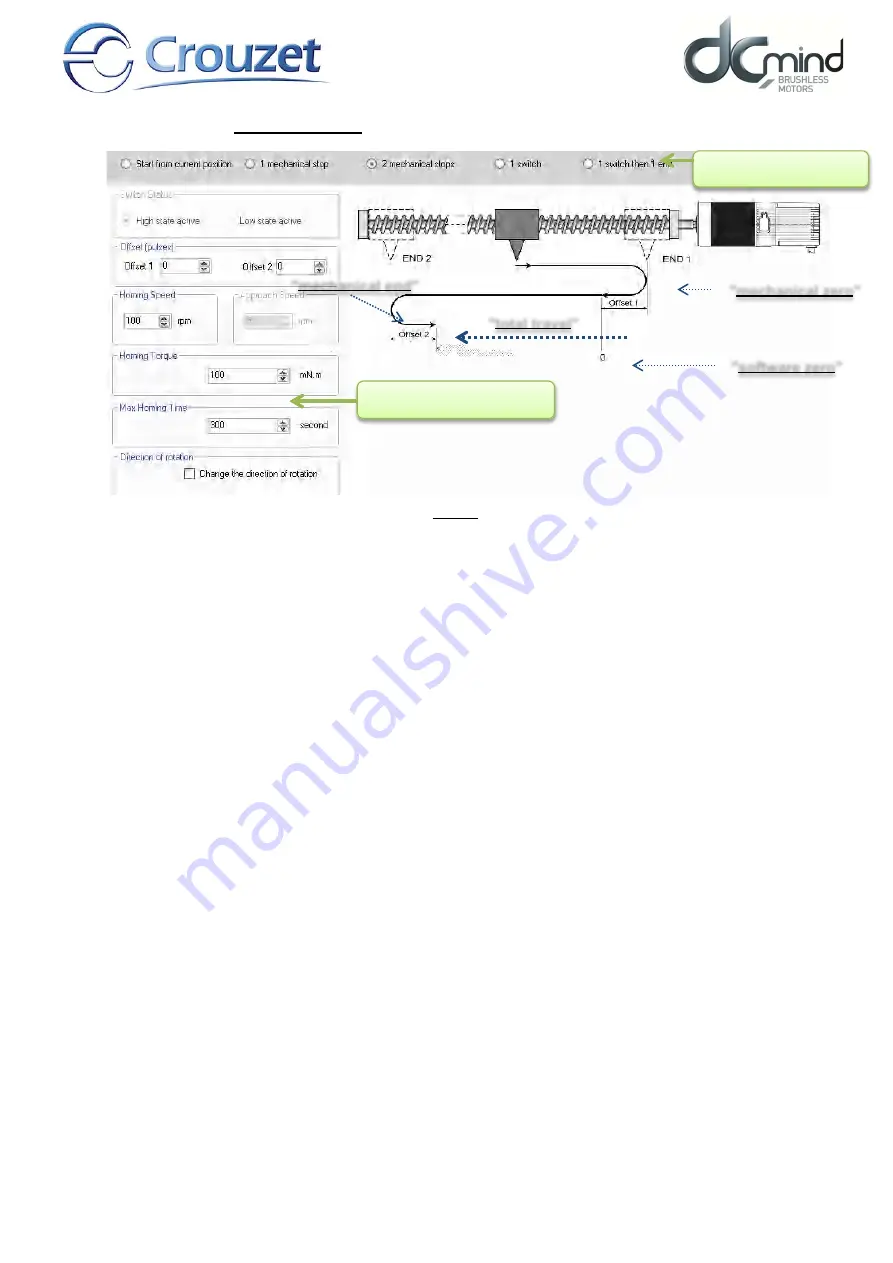
c) 2 mechanical stops:
Figure
167
This homing phase is used to search for the 2 system mechanical stops as follows:
-
Depending on the 1st "END1" stop position (on the right or left), the user selects the appropriate "
Direction
of rotation
"
and sets a "
Homing Speed
".
- When the application torque increases to more than the "
Homing Torque
", the "END1" mechanical stop is
detected, the motor is in the "
mechanical zero
" position.
- To avoid the motor coming into contact with the "END1" mechanical stop each time it returns to the
reference position, "
Offset 1
"
can be set (in encoder pulses) which gives us the difference in position
between the "
mechanical zero
" and the "
software zero
".
- The motor then travels in the opposite direction to find the 2nd mechanical stop "END2". The "END2"
mechanical stop is detected in a similar way. The motor is in the "
mechanical end
" position.
- To avoid the motor coming into contact with the "END2" mechanical stop each time it returns to the
reference position, "
Offset 2
"
can be set (in encoder pulses) which gives us the difference in position
between the "
mechanical end
" and the "
total stroke
".
- After detecting both mechanical stops, the motor positions itself at (END2 – offset 2): the homing phase is
complete.
- As a safety measure, if the homing phase is not complete after the "
Max Homing Time
", the motor detects
a "Homing" type error and stops.
Selection of homing
t
Accessible parameters
"mechanical zero"
"software zero"
"mechanical end"
"total travel"







































































