

















Glossary
MLGPS-P
User's Guide
95
Integer Ambiguity
‒ The integer number of wave cycles of the carrier signal is necessary to calculate the
carrier phase measurement
. Essentially, when a receiver locks onto a carrier signal, it begins to count the
integer number of wave cycles, so that the carrier phase measurement can be calculated by multiplying the
known wavelength by the number of cycles to determine distance. However, there is a period of time between
when the signal is first broadcast, and when the receiver locks on to the carrier signal, meaning there was
some number of wave cycles that the receiver did not count, so the carrier phase measurement cannot be
correctly calculated. This unknown number of wave cycles is known as the
Integer Ambiguity
. It is necessary to
know this number in order to correctly calculate the carrier phase measurement and achieve highly accurate
positioning. A method of
Integer Ambiguity Resolution
must be used to resolve this ambiguity. See Integer
Ambiguity Resolution for more information.
Integer Ambiguity Resolution
‒ The carrier phase measurements are a more accurate measurement of
range than pseudorange measurements, but the carrier phase mea
surement has certain ambiguities ‒
integer
ambiguities
‒ that the pseudorange measurements don't have. Resolving these ambiguities will make the
carrier phase measurements just as unambiguous as the pseudorange measurements, but will keep their
higher accuracy. This process is handled by the processing engine.
Ionospheric Delay
‒ The Ionosphere is the layer of the Earth's atmosphere between 60 and 1000 km above
the surface. It is ionized by solar radiation, and is the atmospheric layer most likely to cause errors in GNSS
positioning. When satellite signals pass through the ionosphere, they can be influenced by the ionized
atmosphere, causing delay and range errors. Errors worsen as the Elevation of a satellite decreases, as the
signal is travelling through the ionosphere for longer. Additionally, the Ionosphere is variable, and can
experience different levels of ionization depending on time of day, time of year, solar activity and latitude.
Ionospheric errors can be greatly reduced through
Differential GPS
. Errors/delay can also be corrected for in
post processing. Ionosphere corrections such as the Klobuchar model can derive the ionospheric delay and
apply the results to the readings in post processing.
L1 Frequency
‒ A carrier signal/carrier phase transmission broadcast at 1.575 GHz, with a wavelength of 19.0
cm. This is the frequency used by single frequency receivers, such as the one used by the MLGPS
. Encoded
onto the L1 frequency is the NAV message containing important corrections and orbit parameters, and the C/A
code and the encrypted P code.
Lock Time
‒ A GNSS receiver will attempt to "lock" onto the signals broadcast by a satellite. The lock time
represents the amount of time that the receiver has managed to continuously track a signal without cycle
slipping. The best accuracy is achieved when the lock times are long.
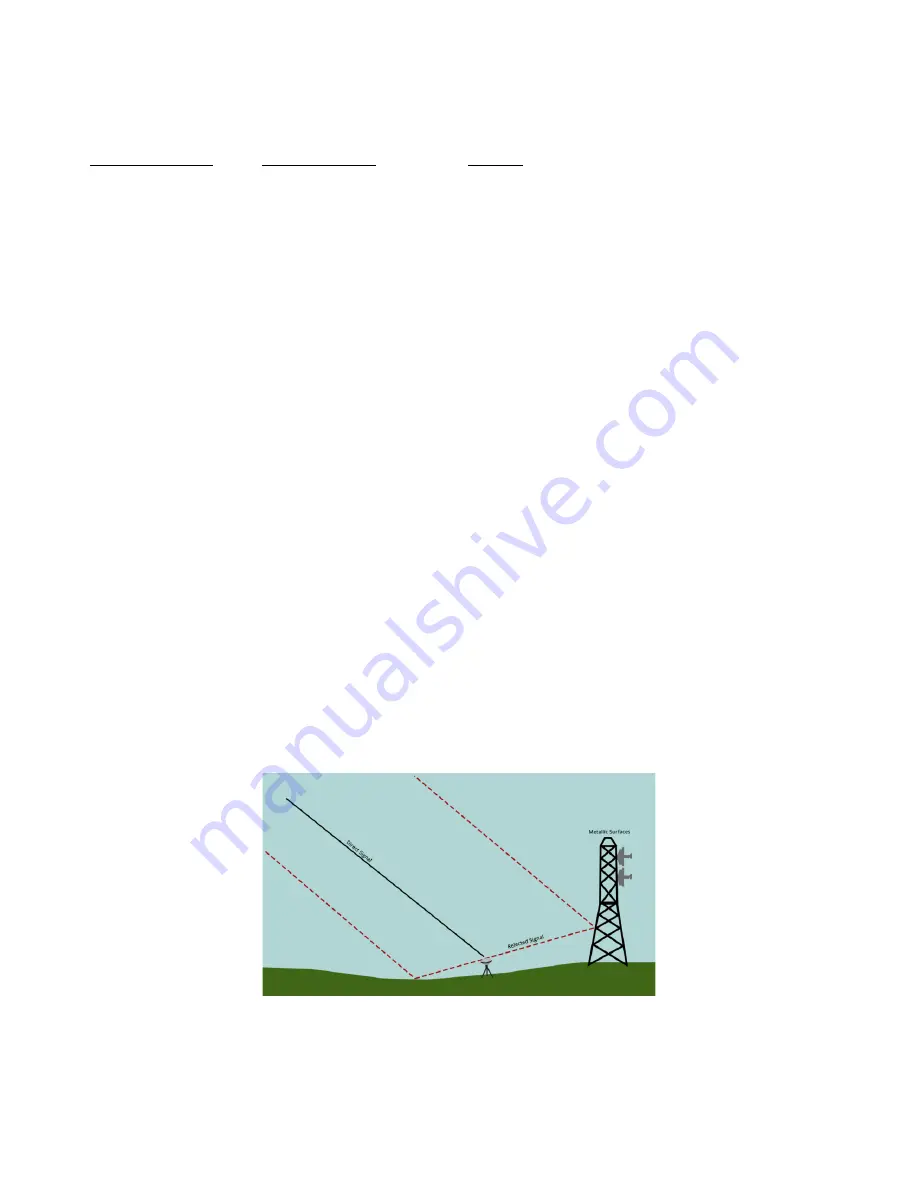
Multipath
‒ Error caused by the reception of signals from the satellite that did not follow the direct line-of-sight.
These signals may have bounced off of an object within the proximity of the GPS receiver antenna, or been
distorted when traveling through objects such as vegetation, but are interpreted as direct signals. Multipath can
be reduced by proper site selection and antenna placement that reduces the number of multipath causing
objects in close proximity to the antenna.
Navigation
(
NAV
)
Message
‒ Encoded onto the L1 and L2 frequencies is the NAV message. It includes the
Almanac and Ephemeris data, time parameters and clock corrections, ionospheric delay estimates and service
parameters. This information is important, as it tells the receiver where the satellite is and what time the
satellite's clocks have. It is broadcast at a low frequency of 50 Hz. It is entirely updated every six days, to
prevent deterioration of the information.







































































