





























©
Copyright Asyril S.A.
Advanced use of the Asycube Control URCap
Version: A2
29/50
Figure 4-7
– Testing smart feeding
4.1.2. Smart centering
The smart centering process can be executed through the Platform node (3.2.1.2 Platform
node), created via the
Asycube Vibrate
node.
This process consists in optimally moving and centering the different parts located on the
Asycube surface, according to their overall position, to make sure that the robot can pick
most of them. Once the smart centering process is executed, the parts should be well
separated and centered on the Asycube surface.
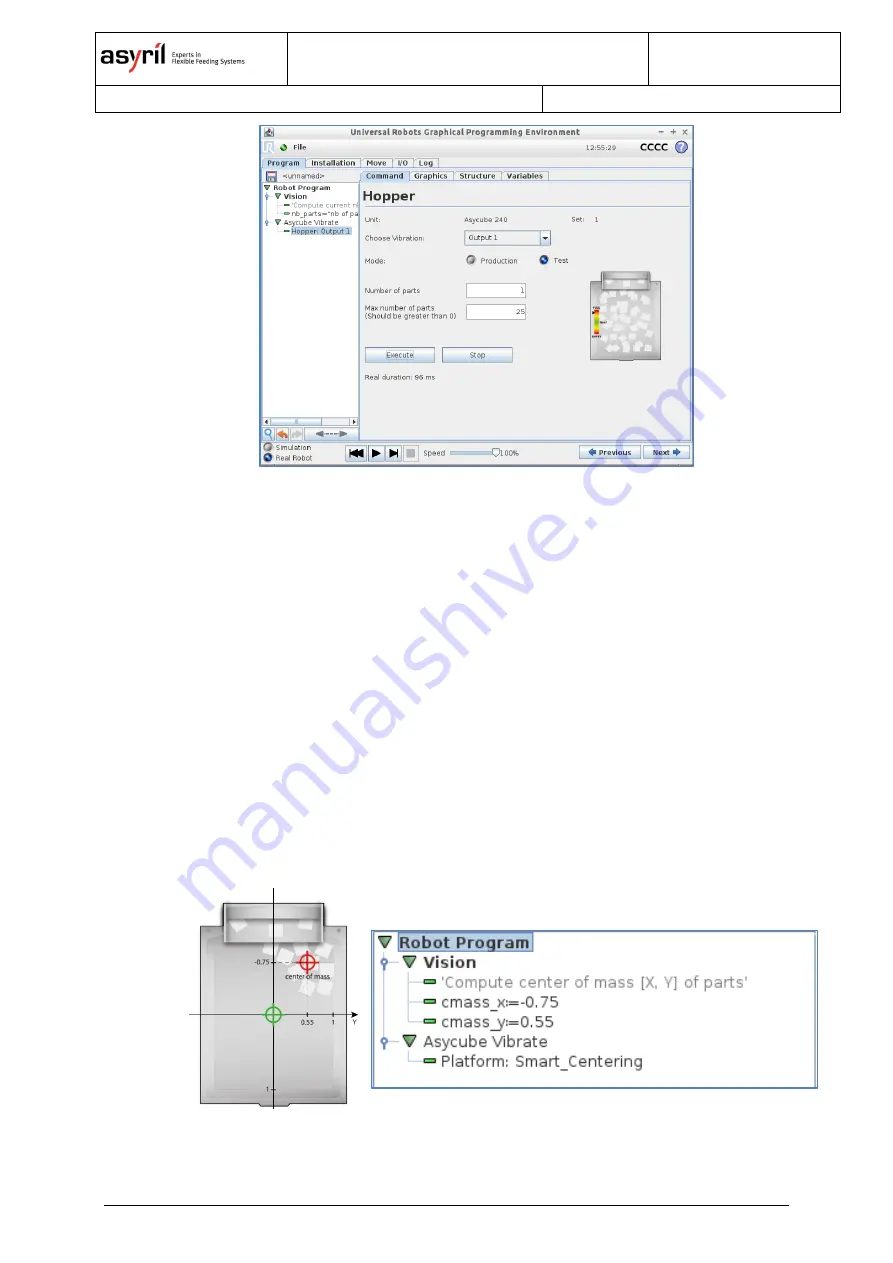
The overall position of the parts is typically returned by a vision system as the center of mass
of the shape enclosing the parts detected on the Asycube surface. The 2D coordinates [X, Y]
of this center of mass are computed from the center of the Asycube surface (coordinates [0,
0]), must be floating values and must be included between -1 and 1. The pictures below
illustrates this process and give an example of a UR program implementing this kind of
process.
Figure 4-8 - Smart centering process implemented by the URCap







































































