





























In different Step-Changing modes, the function of skipping the current segment will have different
effects, as follows:
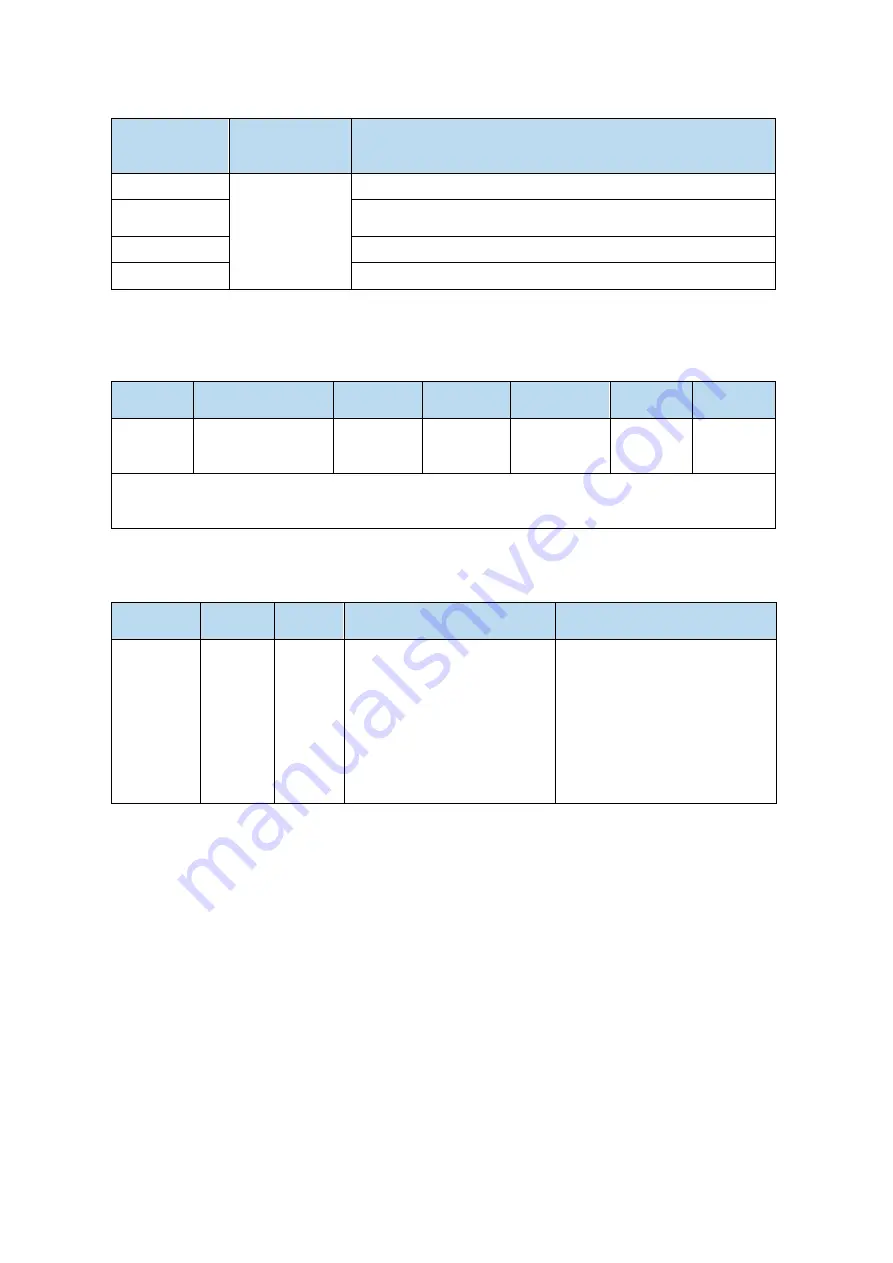
Change step
mode
P4-03 n.xx□x
Skip the present
segment
Actions
0
/Z-CLAMP
Cancel current segment, execute the next segment at once
1
Cancel current segment, execute the next segment when the
change step signal is ON
2
Cancel current segment, execute the next segment at once
3
Cancel current segment, set the F2-09 again
5.3.3.6 Set segment through communication
Parameter
Meaning
Default
setting
Unit
Range
Modify
Effective
F2-09
Set the segment
number through
communication
0
-
0
~
35
Anytime
At once
If this parameter is set to a certain segment number, this segment position will be executed without
step change signal. Communication can be used to modify parameters.
For example: to execute the second segment position, set F2-09 = 0, and then F2-09 = 02.
5.3.3.7 Motion start signal (/MRUN)
Parameter
Signal
name
Default
setting
Meaning
Modify
P5-50
Motion
start
/MRUN
n.0000
Terminal
output
is
not
assigned by default.
It is only valid in the internal
position mode, similar to the
positioning completion signal
in the external pulse mode;
there is output when the motor
is running, and there is no
output when the motor stops.
Parameter range 0000-0014,
assigned to the output interface
through parameter P5-50. When
it is set to 0001, the signal is
output from SO1 terminal.
Summary of Contents for DS5K Series
Page 1: ...DS5K series servo driver User manual WUXI XINJE ELECTRIC CO LTD Data No SC5 03 20200217 1 1...
Page 2: ......
Page 6: ......
Page 107: ...3 Set the auto tuning interface 4 Click ok to start inertia identification...
Page 114: ...3 set the auto tuning interface 4 click ok to estimate the inertia...
Page 116: ...6 Start auto tuning 7 Wait for the end of the auto tuning...
Page 120: ...with higher rigidity 6 Start auto tune 7 Open the servo enable then click ok...
Page 186: ...Appendix 9 Torque speed characteristic curve...
Page 187: ......
Page 188: ......







































































