





























5/12/2017
TECH-538/D.W.O. 23160
Page 61 of 189
Description of Functions
The functions
Snsr
,
LO
,
HI
,
Trnd
and
PID Auto
available in the
MCAL
menu are already described in
Section 8.9.4.1. The functions
PID
and
PID Manual
are described as follows:
PID -
The PID function allows the user to modify the PID settings of the positioner so the user can
optimize the dynamic response of the positioner regarding the speed of response, overshoot, and steady-
state error by varying the appropriate gain settings. This function is often used to fine tune the PID values
obtained from the automatic calibration function (ACAL). The
PID
entry allows the user to modify the
tuning parameters in two different ways:
PID Auto
and
PID Manual
.
PID Manual -
The Fine Tune Proportional (
PCAL
), Integral (
ICAL
) and Derivative (
DCAL
) gain settings can
be varied incrementally on a scale from 1-255. The fine tuning values are directly related to the PID
mathematical formula time constant values (
Ti
or
Td
) and the Proportional gain value (
Kc
).
The proportional gain (
Kc
) has a direct effect on the system response time. As
Kc
is increased the valve
movement response time becomes faster and the static error between setpoint and actual position
becomes smaller. The drawback of increasing the value of
Kc
is that the overshoot and settling time will
increase. If
Kc
is increased too much the valve’s position control becomes unstable, oscillating forever
around the setpoint.
The integrative term (
Ti
) affects the dynamic response of the position control by trying to continuously
reset the positioner error according to the inverse of the
Ti
value. Also, a lower value of
Ti
will have less
damping of the dynamic response. This means the lower the
Ti
the more oscillations (at a higher
frequency) may be observed before the stabilization of the position and vice-versa. Regarding the
Derivative term (
Td
), the greater its value the greater the derivative effect will be. Unlike the proportional
gain and integrative term, the derivative term is not proportional to the error but to the rate of change of
the position. The effect of increasing
Td
is to decrease the overshoot and the control reaction to the rate
of change of the position.
How to find the MCAL functions in the Transducer Block
The equivalent commands of
MCAL
in the Transducer block are available in the parameter
“PSNR_COMMAND”.
shows the commands available in the
MCAL
menu via local display and
their equivalents available in the Transducer block via the parameter “PSNR_COMMAND”.
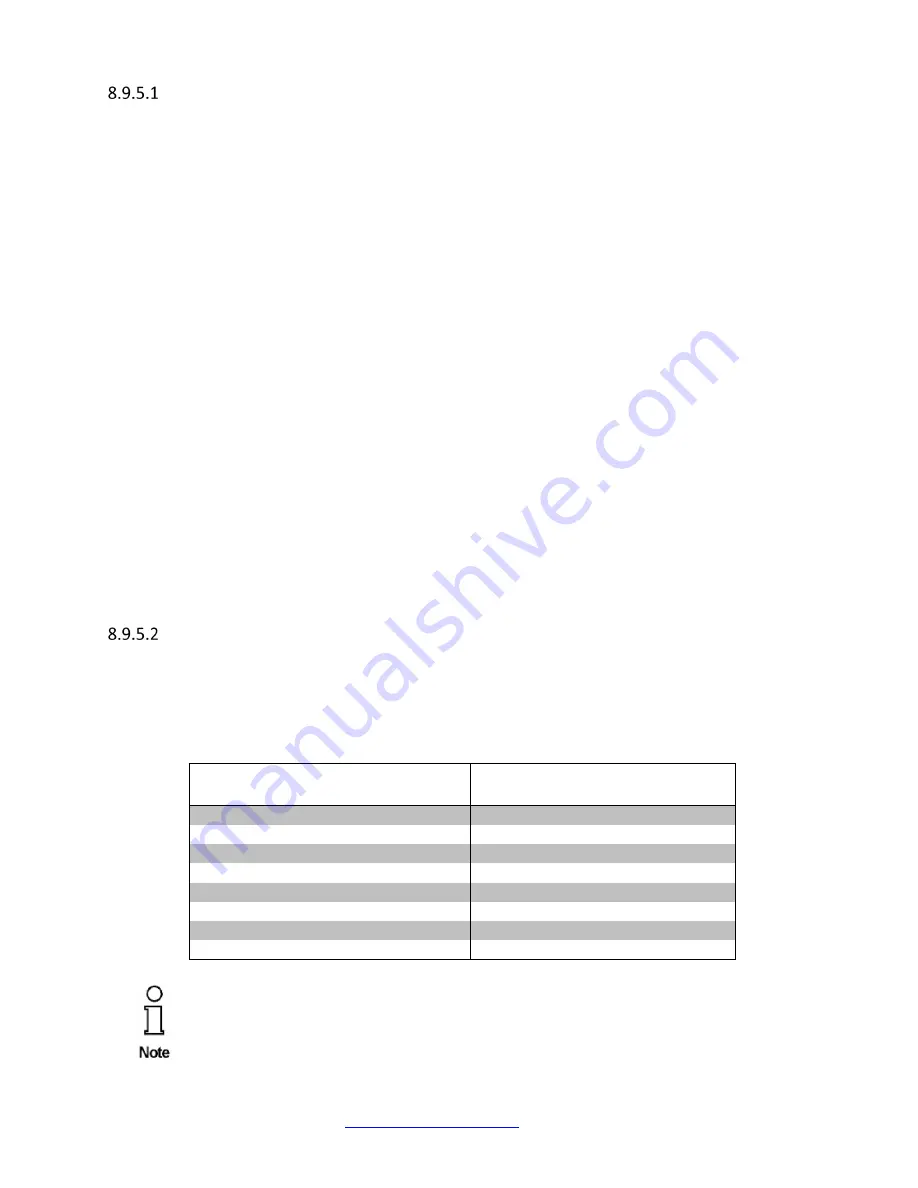
Table 12:
MCAL
parameters and commands via local display menu and equivalents in the Trd block
MCAL parameters and commands in
the local menu via local display
Transducer block parameters
Zero Calibration
PSNR_COMMAND: Start Low/Zero Cal
Span Calibration
PSNR_COMMAND: Start High/Span Cal
PID Auto
PSNR_COMMAND: Start Auto PID Tuning
PID Man: P
SERVO_GAIN
PID Man: I
SERVO_RESET
PID Man: D
SERVO_RATE
Sensor Calibration
PSNR_COMMAND: Start Position Sensor Cal
Transducer Calibration
PSNR_COMMAND: Start Transducer Cal
Note:
Similar to the automatic calibration, before selecting any of the commands in the
parameter “PSNR_COMMAND” present in
, it is necessary to select the command
“Arm” available in the same parameter.
Note:
See Section 11.4.3 to have more information about the Transducer block parameters

























































