




























UI Robot Technology Co. Ltd.
M4220161122CN
Page 51
UI
– SR Series User Manual
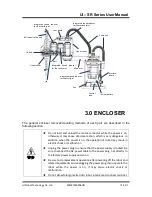
2.5.3 Move
Click “move” button in the main menu, enter robot movement interface.
Tool position:
Set up the coordinate parameter of X, Y, Z and RZ axis to adjust robot position.
Movement joint
:
Set up the angle of big arm, small arm, tool and wrist to adjust robot
position.
3D display
:
After the tool coordinates are setted or the joint coordinates are moved, the
3D demon interface will follow the simulation result for customer
observation.
Speed button
:
The scope is 0-100% of original speed. If set to 30%, the interface
simulation and actual robot movement will run in 30% original speed.
Tech:
Press “teaching” button, robot is in offline state, user can manually adjust robot
position to read the coordinate point.
Notice: teaching requires two persons, one often press “teaching” button, another
one manually adjust robot point.
Clear :
Click “clear” button, tool position and data of movement joint are overall cleared.
Confirm:
After the setting of tool position and movement joint position, click “ok”, the
robot move to the setting position.
Emergency stop:
Click “emergency stop”, robot will stop the running motion.
Movement tool:
Long press direction arrow button, robot will move according to the
arrow direction not stop until to the limit position. Put the mouse into
the arrow, ther will display arrow running direction.
Up and down movement of the third joint.
Combined movement of first and second joints, in which the
up and down arrows indicate Y direction, the left and right







































































