




























Page 28
M4220161122CN
UI Robot Technology Co. Ltd.
UIROBOT SCARA Robot
5.0
MOTION RANGE
Caution
★
When setting up the motion range for safety, both the pulse range and
mechanical stops must always be set at the same time.
The motion range is preset at the factory.
There are three methods for setting the motions range described as follows:
1.
Setting by pulse range(for all joints)
2.
Setting by mechanical stops(for Joint #1 to #3)
3.
Setting the rectangular range in the X,Y coordinate system of the robot(for
Joint #1 and #2).
When the motion range is changed due to layout efficiency or safety, follow the descriptions in
5.1 to 5.2 to set the range.
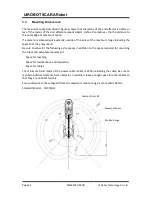
5.1
Motion Range Setting by Pulse Range
Pulses are the basic unit of robot motion. The motion range of the robot is controlled by the
pulse range between the pulse lower limit and upper limit of each joint. Pulse values are read
from the encoder output of the motor.
For the maximum pulse range, refer to the following sections. The pulse range must be set
inside of the mechanical stop range.
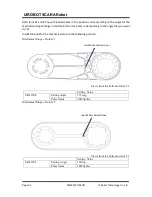
5.1.1 Max. Pulse Range of Joint #1
5.1.2 Max. Pulse Range of Joint #2
5.1.3 Max. Pulse Range of Joint #3
5.1.4 Max. Pulse Range of Joint #4
Once the robot receives an operating command, it checks whether the target position specified
by the command is within the pulse range before operating. If the target position is out of the
set pulse range, an error occurs and the robot does not move.






































































