




























Page 62
M4220161122CN
UI Robot Technology Co. Ltd.
UIROBOT SCARA Robot
in the table below.
When re-tightening these bolts in the work described in this manual, use a torque wrench or
the like to tighten to the torque values shown in the table below, unless otherwise specified.
Bolts
Tighten Torque Value
M3
245
N cm
(25 kgf cm)
M4
490
N cm
(50 kgf cm)
M5
980
N cm (100 kgf cm)
M6
1,760 N cm (180 kgf cm)
M8
3,720 N cm (380 kgf cm)
M10
7,350 N cm (750 kgf cm)
M12
12,740 N cm (1,300 kgf cm)
For locking screws, refer to the following.
为
Locking
Screw
Tighten Torque Value
M4
245 N cm
(25 kgf cm)
M5
392 N cm
(40 kgf cm)
As shown in the figure, bolts arranged on the
circumference are fixed in diagonal order.
Do not fasten the bolts once, but fasten them with a
hexagonal wrench in two or three turns, and then use a
torque wrench or the like to fasten them follow the
torque as shown in the table.
2.5 Origin Position
If the integrated machine, belt, ect. are replaced, deviration occurs between origin stored in
robot and the origin stored in controller, and the robot can not be controlled correctly.
Therefore, after the replacement origin adjustment (calibration) is required, so that the two
origin points are the same.
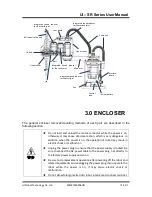
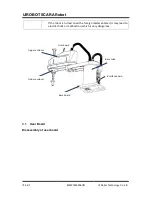
2.6 Configuration of Maintenance Components
螺栓孔







































































