





























PICO-IMX6 REV. A1. HARDWARE MANUAL
– VER 1.01 – JAN 28 2016
Page
39
of
64
3.12. CAN BUS Interface signals
The PICO-IMX6 features two CAN bus interfaces. The CAN bus interfaces are implemented with the
i.MX6 on chip “Flexible Controller Area Network” (FlexCAN) communication modules.
FlexCAN supports the following main features:
Compliant with the CAN 2.0B protocol specification
Programmable bit rate up to 1 Mb/sec
Integration of a CAN Bus transceiver and optional galvanic isolation should be incorporated on your
carrier board.
For additional details, please refer to the “Flexible Controller Area Network (FLEXCAN)” chapter of the
“i.MX6 Reference Manual”.
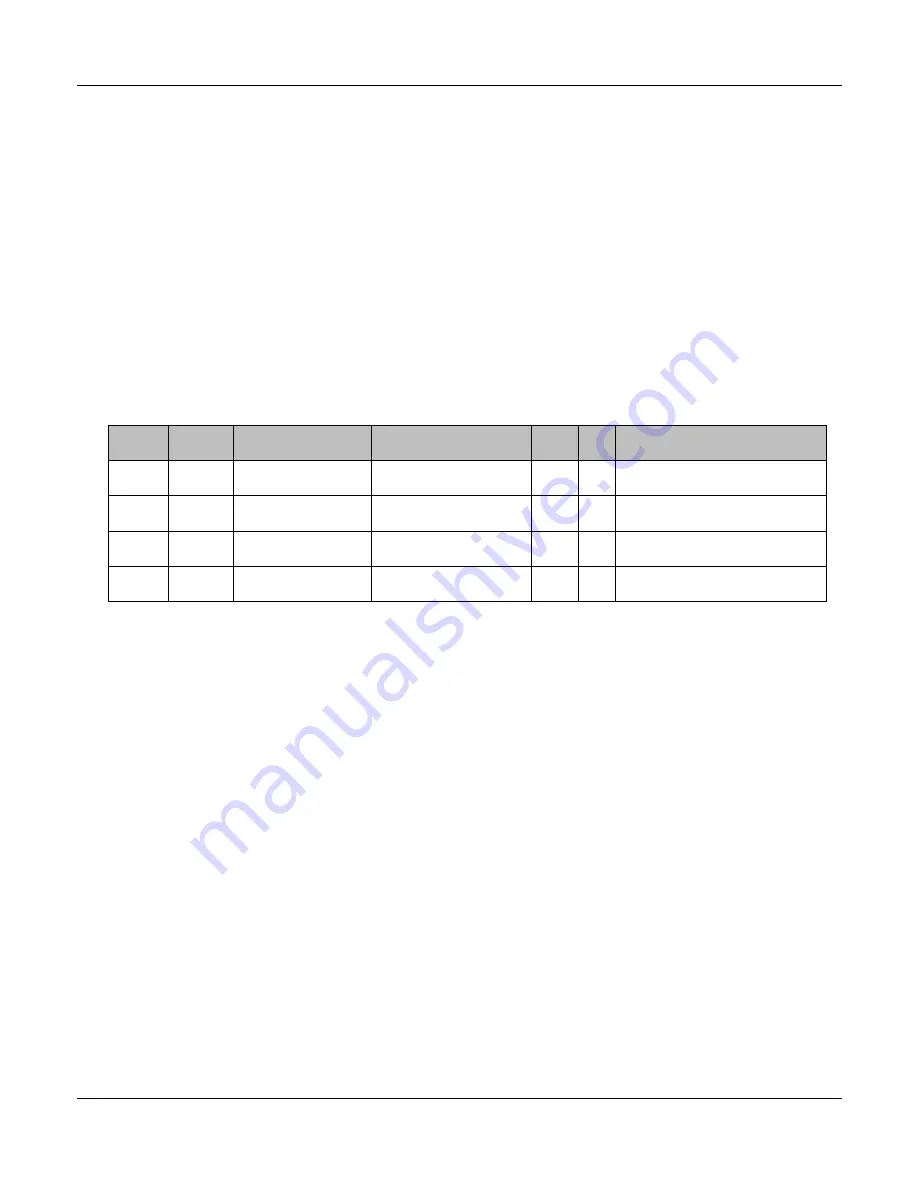
Table 18 - CAN Bus Signal Description
PIN
CPU
BALL
CPU PAD NAME
Signal
V
I/O Description
X2_19
W6
KEY_COL2
CAN1_TX
3V3
I/O
CAN (controller Area
Network) transmit signal
X2_21
W4
KEY_ROW2
CAN1_RX
3V3
I/O
CAN (controller Area
Network) receive signal
X2_25
T6
KEY_COL4
CAN2_TX
3V3
I/O
CAN (controller Area
Network) transmit signal
X2_27
V5
KEY_ROW4
CAN2_RX
3V3
I/O
CAN (controller Area
Network) receive signal







































































