





























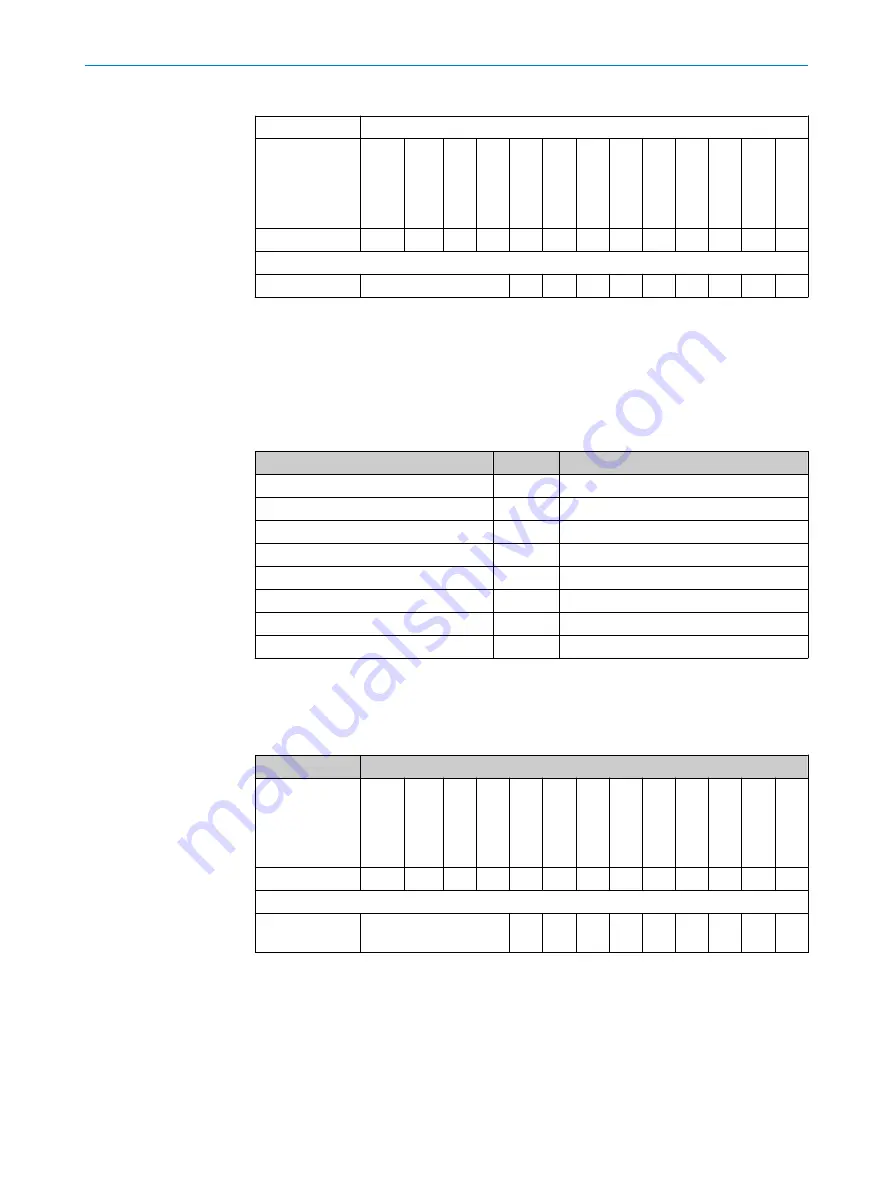
Table 59: Reading the resolution.
Transaction
Register
P
C_BUFFER0
P
C_BUFFER1
P
C_BUFFER2
P
C_BUFFER3
P
C_BUFFER4
P
C_BUFFER5
P
C_BUFFER6
P
C_BUFFER7
P
C_ADD_H
P
C_ADD_L
P
C_OFF_H
P
C_OFF_L
P
C_C
TR
L
Write
58
81
00
00
01
Wait for FREL = 1
Read
Resolution (32 bit)
8.4.3
Measurement range
The measurement range defines the number of coded rotations of the encoder (rotary
encoders), or the coded measurement range in multiples of measurement steps (linear
encoders).
Direct read access to measurement range returns the defining values:
Table 60: Resolution defining values
Defining value
Offset
Value
RID
082h
Resource name
0
"RANGE"
Data size
1
4
Read access level
2
0
Write access level
3
15
Time overrun
4
70
Data type
5
05h – 32 bit, unsigned
Mandatory
yes
The measurement range is given as a 32 bit unsigned value.
For this resource, access to the offset base is not meaningful as the size of the
resource data is smaller than the maximum for a "long message" transaction.
Table 61: Reading the measurement range.
Transaction
Register
P
C_BUFFER0
P
C_BUFFER1
P
C_BUFFER2
P
C_BUFFER3
P
C_BUFFER4
P
C_BUFFER5
P
C_BUFFER6
P
C_BUFFER7
P
C_ADD_H
P
C_ADD_L
P
C_OFF_H
P
C_OFF_L
P
C_C
TR
L
Write
58
82
00
00
01
Wait for FREL = 1
Read
Measurement range (32
bit)
8.4.4
Type name
This resource indicates the type name of the encoder. The designation is stored in ASCII
format with a maximum length of 18 characters. Unallocated characters are stored with
the ASCII code 00h.
Direct read access to type name returns the defining values:
MOTOR FEEDBACK SYSTEM RESOURCES
8
8017595/ZTW6/2018-01-15 | SICK
T E C H N I C A L I N F O R M A T I O N | HIPERFACE DSL
®
95
Subject to change without notice







































































