





























140
(3) Description of Output signal function
·Ready for servo-on [RDY]: (Reference value 1)
This signal is turned on if the servo motor is ready to operate.
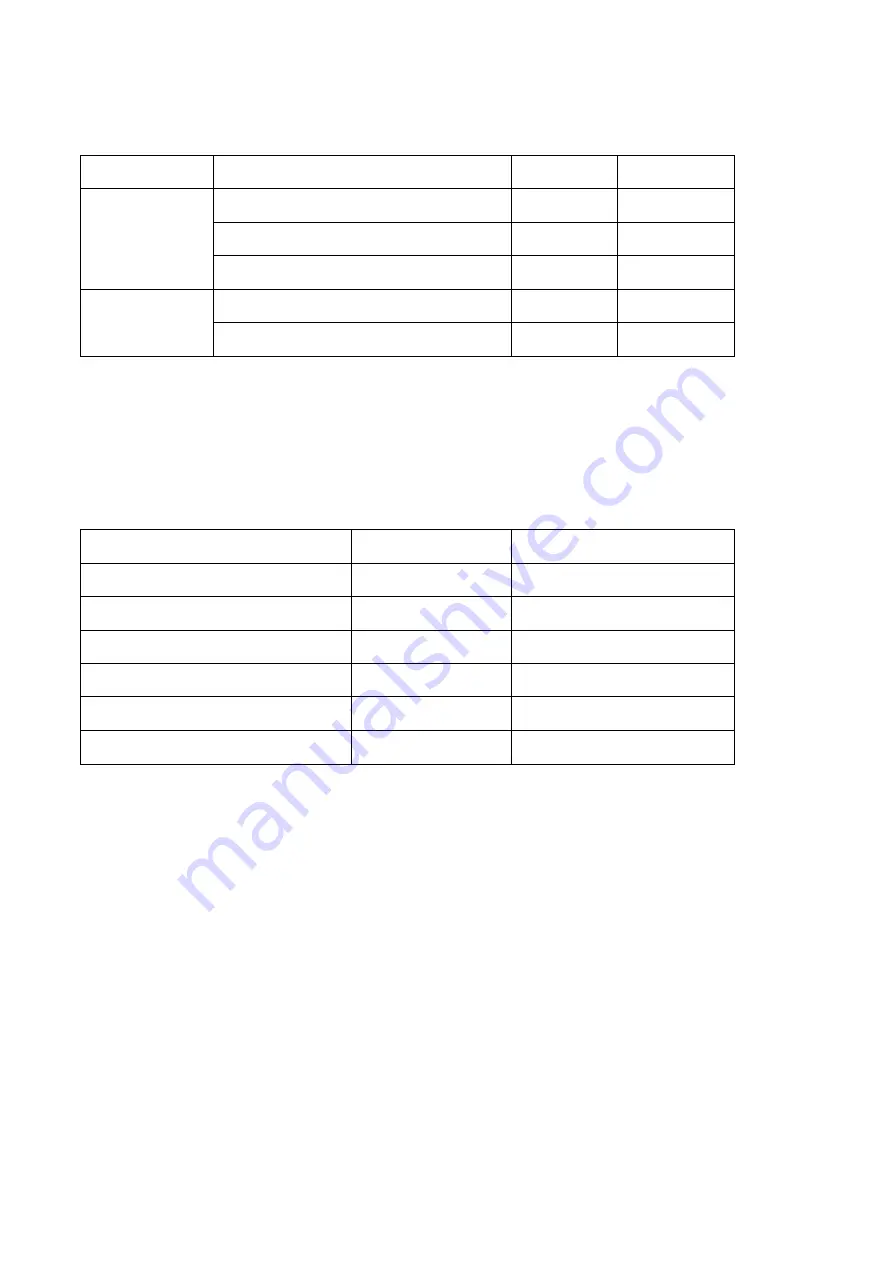
The ready for servo-on signal is turned on if the conditions shown in the table below are satisfied.
Signal division
Signal name
Function No.
Signal status
EI input
Servo-on [S-ON]
1
ON
Forced stop [EMG]
10
ON
Free-run [BX]
54
OFF
EOUT output
Alarm detection (Normally open contact)
16
OFF
Servo control ready [S-RDY]
28
ON
The host controller can check if the servo motor is rotatable or not via the signal [RDY] ON or OFF.
·In-position [INP]: (Reference value 2)
This signal is turned on after a positioning motion is finished.
(1) Status of in-position signal
The state under position control is shown in the table below.
Factor
Sequence status
Status of in-position signal
If servo-on [S-ON] is turned OFF
Free-run
ON
If servo-on [S-ON] is turned ON
Servo lock
ON
Upon OT detection
Servo lock
ON
At deviation clear
Servo lock
ON
If forced stop [EMG] is turned off
Zero speed
ON
Upon alarm
Free-run
OFF
This signal is always turned on under speed control and torque control.
(2) In-position signal output format
P1.33 (in-position output format) at either "0" (level) or "1" (single shot) can be set.
·Speed limit detection: (Reference value 11)
The signal is turned on if the rotation speed of the servomotor reaches the preset speed limit.
Under speed control and position control (except for command pulse operation), the speed limit depends on
the setting of P1.25 (maximum rotation speed for position and speed control).
Under torque control, the speed limit depends on the setting of P1.26 (maximum rotation speed for torque
control).
However, if P2.56 (speed limit selection at torque control) is "1," the speed limit can be selected with
multi-step speed settings X1 to X3.







































































