





























131
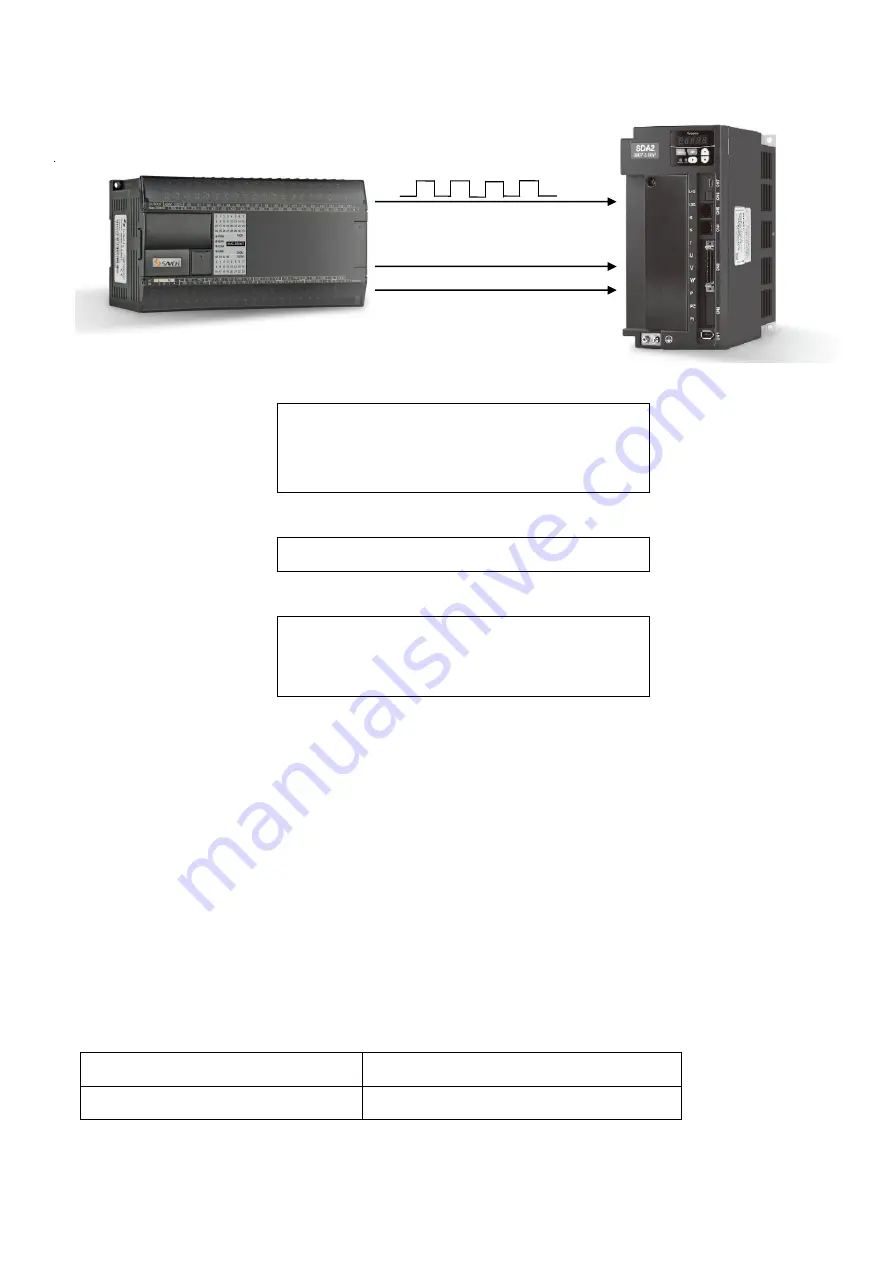
[Example] To conduct operation with a command pulse input
Operation with a command pulse input is enabled while command pulse ratio 1 or command pulse
ratio 2 remains turned on after the position control signal is turned on.
The conditions for enabling position control with the command pulse input are shown below:
Servo-on [S-ON] = ON
Forced stop [EMG] = ON
(Control output ready for servo-on [RDY] = ON)
↓
Position control(37)= ON
↓
The command pulse is enabled while command
pulse ratio 1(27) or command pulse ratio 2 (28)
remains turned on.
·Torque control: (Reference value 38)
Use to conduct torque control in the extension mode.
This function is enabled only if "6" (extension mode) is selected for parameter P1.01.
Turn on to conduct torque control in the extension mode.
The torque of the output shaft of the servo motor can be controlled.
The torque is actually output while the forward command [FWD] or reverse command [REV] signal remains
turned on.
Besides, the rotation direction depends on the different forward command [FWD] or reverse command [REV]
signal.
The torque command value depends on the input voltage applied to the TREF terminal. (Refer to the table
below.)
Voltage applied to TREF terminal
Output torque (rated torque 100%)
±3[V]
±100[%]*
*P3.33: If the torque command scale value is the default value.
If no signal is assigned on the EI input terminals, it is always regarded as turning OFF.
。
Position Control
(
37
)
Command pulse ratio 1
(
27
)
Pulse