



























139
application, make appropriate adjustment for this parameter based on whether the control is steady and response delay
condition.
F6.12
Error limit of analog input
0.00V
~
10.00V
0.10
When analog input signal shows frequent fluctuation around the set point, set F6.12 to restrain the frequency fluctuation
caused by this fluctuation.
F6.13
Threshold of zero-frequency operation
Zero-frequency
hysteresis
~
50.00Hz
0.00
When F0.18=1
(
high frequency mode
)
, the upper limit of this function code is 500.0Hz.
F6.14
Zero-frequency hysteresis
0.00
~
zero-frequency running threshold
value
0.00
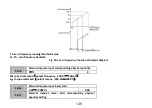
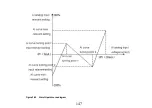
These two function codes are used to set zero-frequency hysteresis control function. Take analog AI1 current setting
channel for example, as showed in Fig. F6-1.
Start process:
After start command is sent, only when analog AI1 current input reaches or exceeds value Ib and the according
frequency reaches fb, the motor can start and speed up according to accelerating time until reaching the according
frequency of analog AI1 current input.
Stop process:
When AI1 current falls to value Ib during running, the VFD won’t stop immediately. Only when AI1 current falls to Ia and
the according setting frequency is fa, the VFD will stop output. This fb is defined as zero-frequency running threshold
value, determined by F6.13; fb-fa is defined as zero-frequency hysteresis, determined by F6.14.
This function can achieve sleep function and maintain an energy-saving operation, and avoid frequent fluctuation
around threshold frequency through hysteresis width.







































































