





























± 2g / 4g / 8g / 16g Tri-axis Digital
Accelerometer Technical
Reference Manual
PART NUMBER:
KX132-1211
Rev. 1.0
31-Jul-2019
36 Thornwood Dr.
–
Ithaca, NY 14850
© 2019 Kionix
–
All Rights Reserved
tel: 607-257-1080 – fax:607-257-1146
893-12874-1907311402-0.17
www.kionix.com -
Page
51
of
73
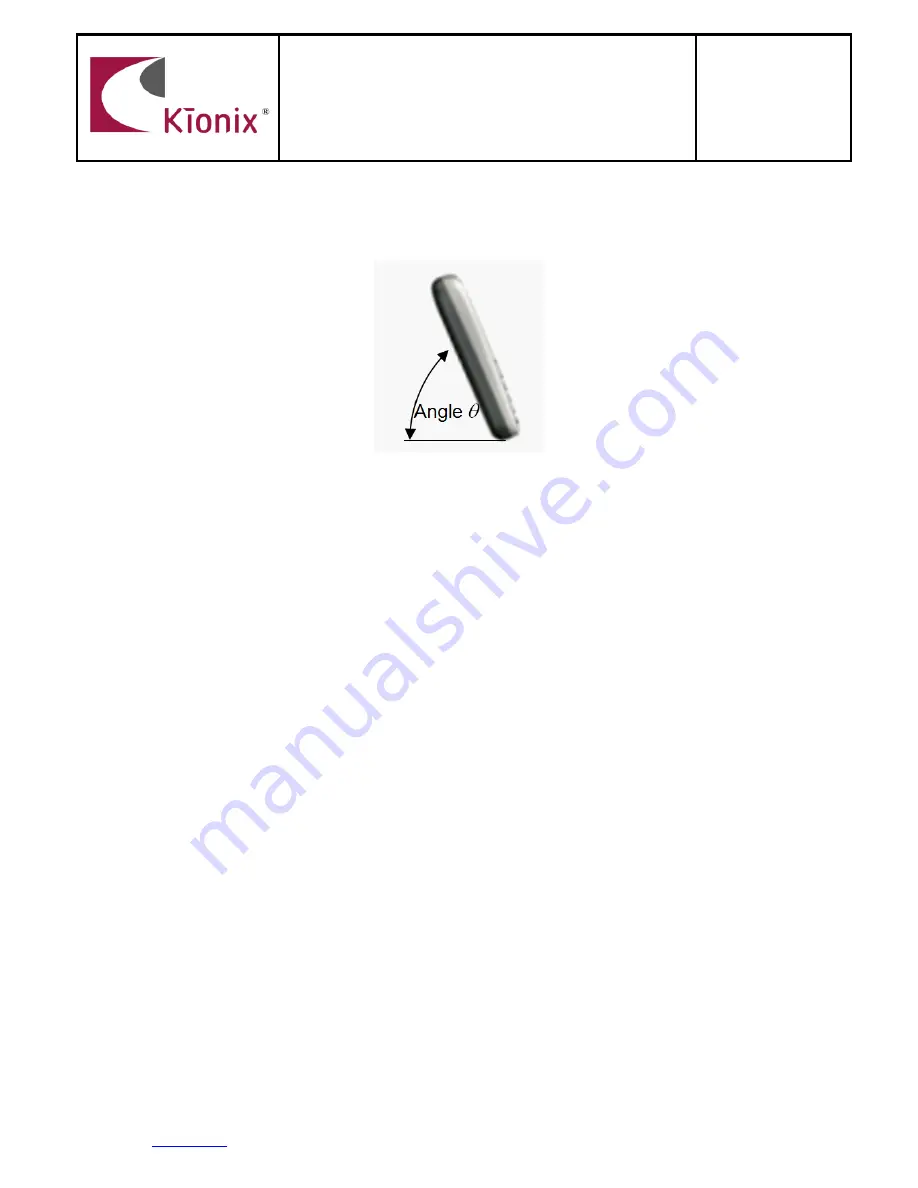
Device Orientation Angle (Tilt Angle)
To ensure that horizontal and vertical device orientation changes are detected, even when it isn’t in the ideal vertical
orientation – where the angle θ in Figure 3 is 90°, the KX132-1211 considers device orientation angle in its algorithm.
Figure 3:
Device Orientation Angle
As the angle in Figure 3 is decreased, the maximum gravitational acceleration on the X-axis or Y-axis will also decrease.
Therefore, when the angle becomes small enough, the user will not be able to make the screen orientation change.
When the device orientation angle approaches 0° (device is flat on a desk or table),
a
x
=
a
y
= 0g,
a
z
= +1g, and there is
no way to determine which way the screen should be oriented, the internal algorithm determines that the device is in
either the face-up or face-down orientation, depending on the sign of the z-axis. The KX132-1211 will only change the
screen orientation when the orientation angle is above the factory-defaulted/user-defined threshold set in the
TILT_ANGLE_LL register. Equation 3 can be used to determine what value to write to the TILT_ANGLE_LL register to
set the device orientation angle. The value for HL is preset at the factory but can be adjusted in special cases (e.g. to
reduce the effect of transient g-variation such as when device is being moved rather than just being rotated).
TILT_ANGLE_LL (counts) = sin θ * (32 (counts/g))
Equation 3:
Tilt Angle Threshold
Tilt Timer
The 8-bit register, TILT_TIMER can be used to qualify changes in orientation. The KX132-1211 does this by
incrementing a counter with a size that is specified by the value in TILT_TIMER for each set of acceleration samples to
verify that a change to a new orientation state is maintained. A user defined Tilt Position output data rate (ODR) as set
by OTP<1:0> bits in CNTL3 register, determines the time period for each sample. Equation 4 shows how to calculate
the TILT_TIMER register value for a desired delay time.
TILT_TIMER (counts) = Delay Time (sec) x Tilt Position ODR (Hz)
Equation 4:
Tilt Position Delay Time







































































