





























Operator Unit
130--613
Operator Unit
21
Edition: March 11, 2005
3648/130--613.DOC010102
2.2.2.3
General Error Messages
The CAN bus is designed for redundancy and carries out error processing in the
background.
“One” CAN bus has failed.
Reaction:
This error can be detected only by constantly observing the display unit.
If one CAN bus fails (for example if the plug comes loose) the display information is
frozen briefly (for appr. 2 seconds) while the data is transferred to the second CAN bus.
No special message is output onto the display unit.
Once the data has changed over to the second bus data transfer will continue
undisturbed. User functions are not restricted as long as only one fault is present.
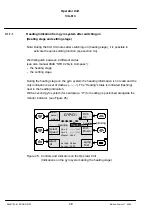
No usable data on the CAN bus.
Dim
Up
Dim
Down
GYRO 1
No Heading
Gyro 2
------.--
°
Gyro 3
------.--
°
Magnet
------.--
°
------.--
°
Select
Speed
Select
Lat
Select
Sensor
& Menu
Aut Spd: ----.
--
Kts
Aut Lat: ----
°
----‘
Figure 16: Controls and Indicators on the Operator Unit
(No usable data on the CAN bus -- 1st message)
Initially the heading information is faded out and replaced with horizontal dashes in this
first message (see Figure 16).
The display alters after 3--5 seconds and information about the error is displayed.






















































