





























SDRIVE 700
POWER ELECTRONICS
68
DESCRIPTION OF PROGRAMMING PARAMETERS
10.10.
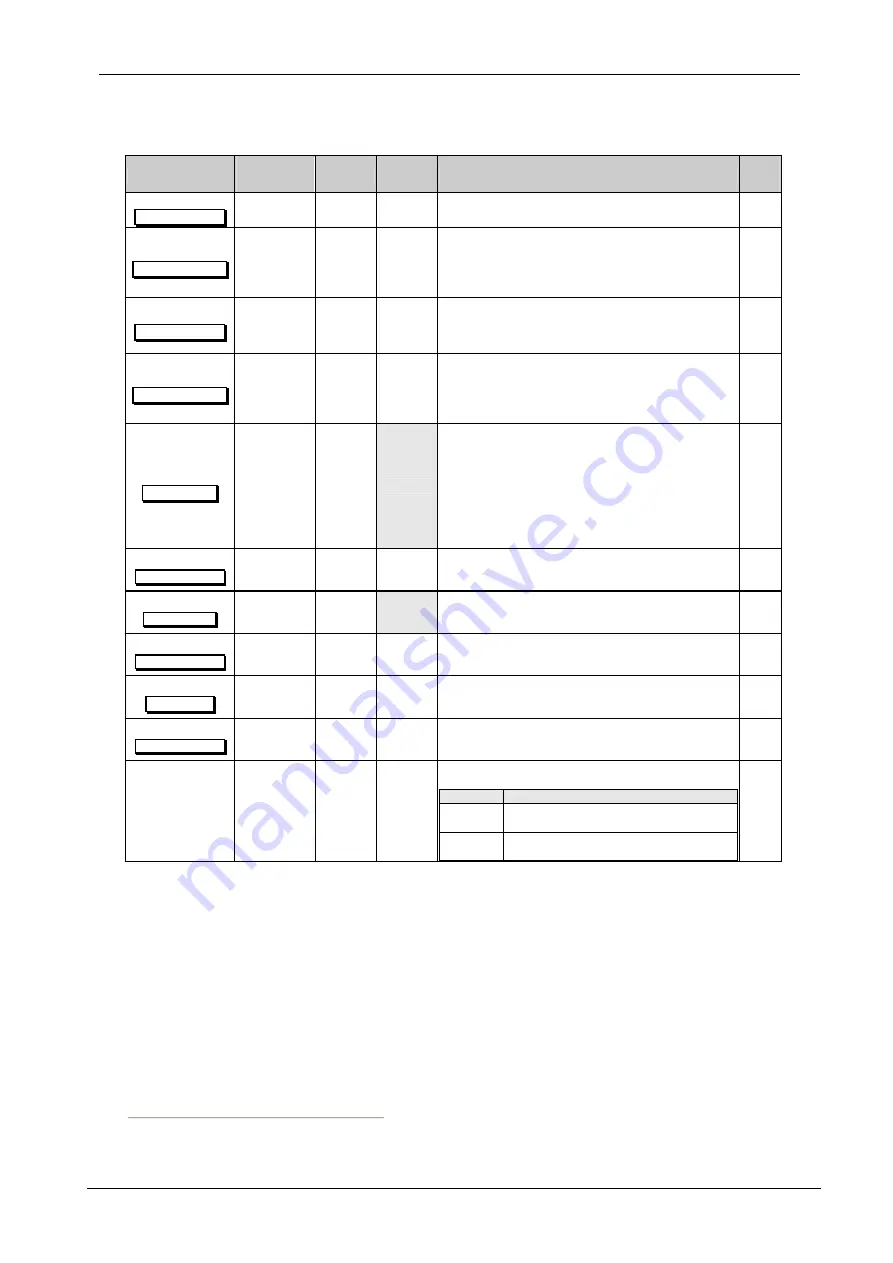
Parameter
Name /
Description
Range
Default
value
Function
Set on
RUN
1 MIN1 SP=+0.00%
SPEED MIN LIMIT1
G10.1
/ Minimum
speed limit 1
-250% to
Max speed 1
+0.00% This sets the minimum speed limit 1 that can be applied to the motor
by the drive. It is set in percentage of motor rated speed.
YES
2 MAX1 SP=+100%
SPEED MAX LIMIT1
G10.2
/
Maximum speed
limit 1
Min. speed 1
to +250%
+100%
This sets the maximum speed limit 1 that can be applied to the
motor by the drive. If the reference is higher than the value set in
this parameter, the drive will ignore that reference and will operate
the motor at the value set in this screen.
It is set in percentage of motor rated speed.
YES
3 MIN2 SP=-100%
SPEED MIN LIMIT2
G10.3
/ Minimum
speed limit 2
-250% to
Max speed 2
-100%
This sets the minimum speed limit 2 that can be applied to the motor
by the drive. It is set in percentage of motor rated speed.
Note:
Selection of minimum speed limit 2 is done via a digital input
or comparator output function.
YES
4 MAX2 SP=+100%
SPEED MAX LIMIT2
G10.4
/
Maximum speed
limit 2
Min. speed 2
to +250%
+100%
This sets the maximum speed limit 2 that can be applied to the
motor by the drive. If the reference is higher than the value set in
this parameter, the drive will ignore that reference and will operate
the motor at the value set in this screen.
It is set in percentage of motor rated speed.
YES
5 I LIMIT=___A
MAX CURRENT
G10.5
/ Current
limit
0.25 to
1.50In
∗
Output current limit. Motor current will be within this programmed
limit. When this protection is active the SD700 status of current
limitation (ILT) is displayed.
Note:
We do not recommend that current limit works constantly in
applications when the motor is at steady speed status. Damage may
occur to the motor and torque variations can affect the load. Current
limit should work only when an overload occurs, or due to excessive
acceleration and deceleration values, or because motor data details
are entered incorrectly.
YES
6 I LIM TO= OFF
TIMOUT MAX CURRE
G10.6
/ Trip time
because of
current limit
0 to 60s,
OFF=61
OFF
If the drive is operated continually at current limit for the time set in
this screen the drive generates a fault.
YES
7 I. MAX2=____A
MAX CURRENT 2
G10.7
/
Alternative
current limit
0.25 to
1.50In
∗
This limit operates with the same philosophy than G10.5, but for the
second current limit.
YES
8 MI2 brSP=OFF
MAX CURR BRK SPD
G10.8
/ Change
speed for Imax 2
OFF=0%, 1
to +250%
OFF
It allows setting the speed level to change from current limit 1 to
current limit 2. Additionally it is possible to select the alternative
current limit 2 using a digital input configured as option 23.
YES
9 MAX TOR=+150%
MAX TORQUE
G10.9
/ Torque
limit
-250% to
+250%
+150%
This value is the maximum motor torque the drive will allow the
motor to supply to the load. It is set in percentage of motor rated
torque.
YES
10 T LIM TO=OFF
TIMEOUT MAX TORQ
G10.10
/ Trip
time because of
torque limit
0 to 60s,
OFF=61
OFF
If the drive is operated continually at torque limit for the time set in
this screen the drive generates a fault.
YES
11 INVERSION ?=N
G10.11
/ To
enable speed
inversion
N
Y
N
The drive can be configured to prevent the motor running in
negative direction.
OPT
FUNCTION
N=NO
Motor running in negative rotation direction is not
allowed.
Y=YES
Motor running in both rotation directions is
allowed.
YES
∗
This value depends on the drive rating.







































































