





























3 Product Description
C-863.12 Mercury Controller
MS249E
Version: 1.2.1
25
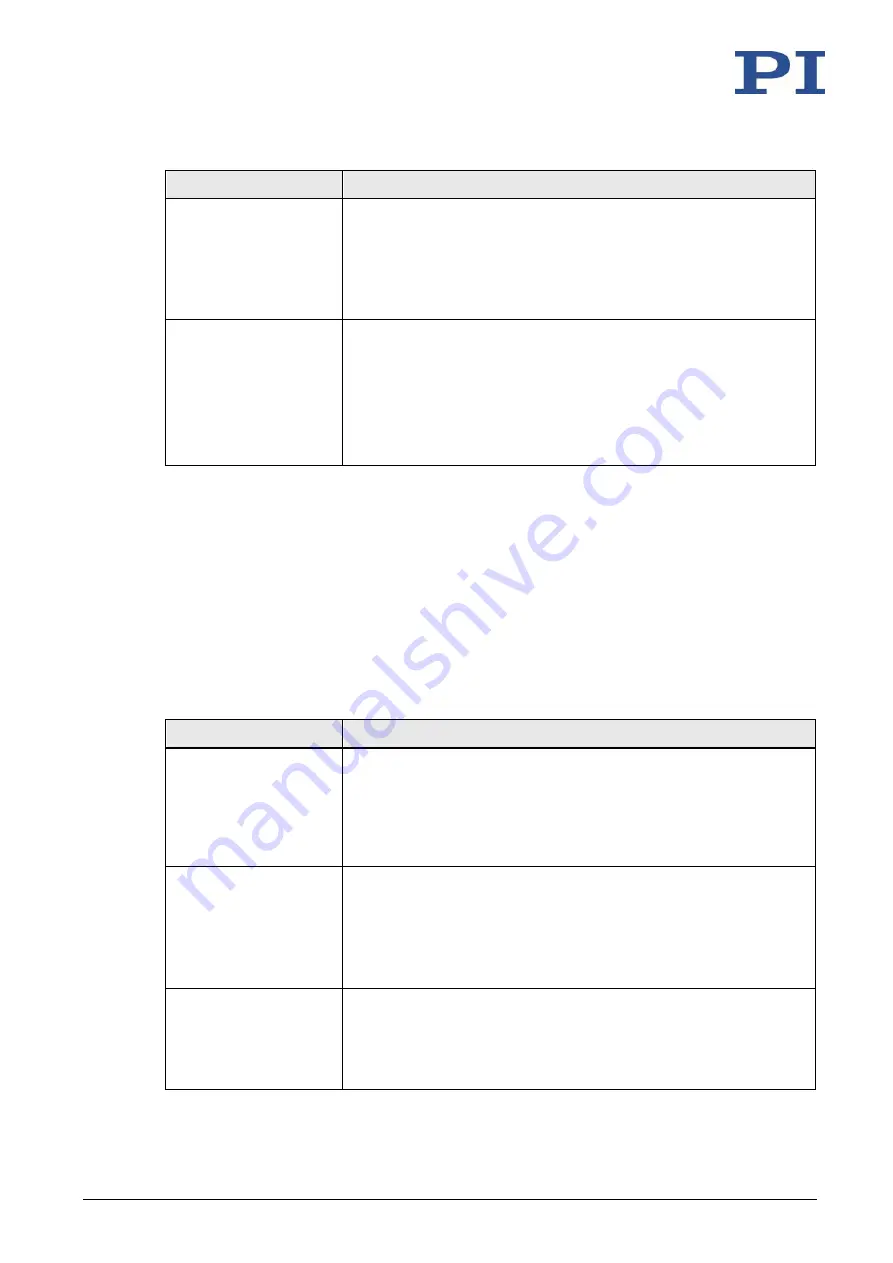
Parameters
Description and Possible Values
Has No Limit Switches?
0x32
Does the positioner have limit switches?
0 = Positioner has limit switches (signal inputs on motor connector)
1 = Positioner does not have limit switches
This parameter activates or deactivates a stop of the motion at the
limit switches installed.
Use Limit Switches Only
For Reference Moves?
0x77
Should the limit switches only be used for reference moves?
0 = Use limit switches for stopping at the end of the travel range and
for reference moves (default)
1 = Use limit switches only for reference moves
This parameter is intended for use with rotation stages.
This parameter is only evaluated when the parameter 0x32 has the
value 0.
The signals from the limit switches (also end-of-travel sensors) of a linear positioner are used to
stop motion in front of the hard stop at both ends of the travel range. Because the set
deceleration is not taken into account here, there is a risk at high velocities that the positioner
will hit the hard stop anyway. To prevent this, soft limits (p. 25) can be set via parameters of the
C-863.12.
The limit switch signals can also be used for reference moves. After a reference move to a limit
switch, the controller knows the absolute axis position; see "Referencing" (p. 28).
3.5.13
Travel Range and Soft Limits
The following parameters of the C-863.12 reflect the physical travel range of the positioner and
define soft limits:
Parameter
Description and Possible Values
Maximum Travel In
Positive Direction (Phys.
Unit)
0x15
Soft limit in positive direction (physical unit)
Based on the zero position. If this value is smaller than the position
value for the positive limit switch (which results from the sum of the
parameters 0x16 and 0x2F), the positive limit switch cannot be used
for reference moves.
The value can be negative.
Value At Reference
Position (Phys. Unit)
0x16
Position value at the reference switch (physical unit)
The current position is set to this value if the axis has performed a
reference move to the reference switch.
The parameter value is also used for calculating the position values
set after reference moves to the limit switches; this also applies
when the mechanics do not have a reference switch.
Distance From Negative
Limit To Reference
Position (Phys. Unit)
0x17
Gap between reference switch and negative limit switch (physical
unit)
If the axis has performed a reference move to the negative limit
switch, the current position is set to the difference between the
values of parameters 0x16 and 0x17.