





























3 Product Description
22
Version: 1.2.1
MS249E
C-863.12 Mercury Controller
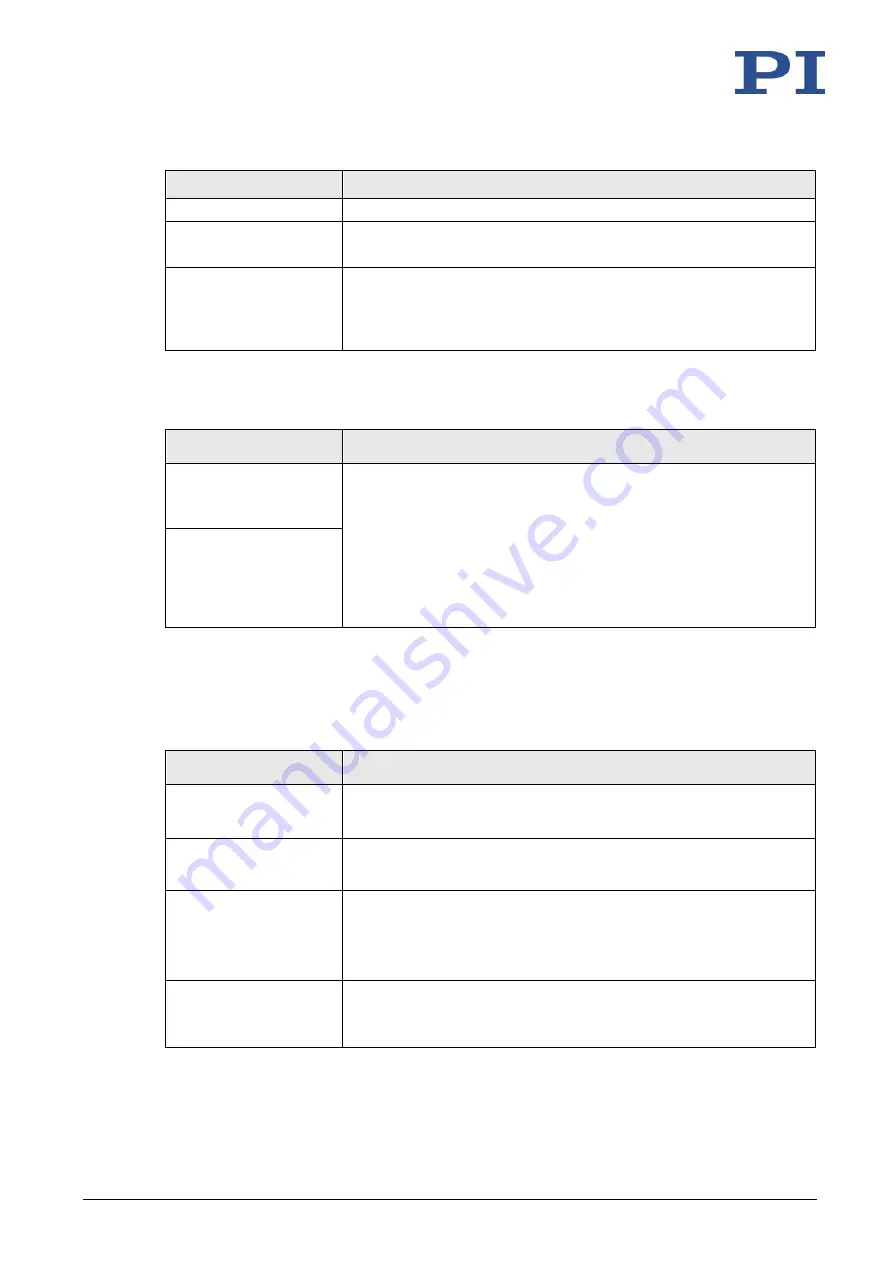
Parameters
Description and Possible Values
Aim: Damping of rapid control oscillations
I-Limit
0x414
Limit of the integration constant (dimensionless)
0 to 32767
D Term Delay (No. Of
Servo Cycles)
0x71
D term delay
The D term can be calculated as a floating average over several servo
cycles. The parameter specifies how many values (i.e., servo cycles)
are to be used for averaging.
The input of the servo algorithm can be configured for the C-863.12 with the following
parameters:
Parameters
Description and Possible Values
Numerator Of The Servo
Loop Input Factor
0x5A
Numerator and denominator of the servo-loop input factor
1 to 1,000,000 for both parameters
The servo-loop input factor decouples the servo control parameters
from the encoder resolution.
The servo-loop input factor is independent of the factor for counts
per physical length unit (0xE and 0xF).
Numerator and denominator of the servo-loop input factor should
not be changed.
Denominator Of The
Servo-Loop Input Factor
0x5B
Corrections of the dynamics profile
The dynamics profile corrections for closed-loop operation can be configured via the
parameters listed below:
Parameters
Description and Possible Values
Motor Offset Positive
0x33
Offset for the positive direction of motion (dimensionless).
0 to 32766
Motor Offset Negative
0x34
Offset for the negative direction of motion (dimensionless).
0 to 32766
Motor Drive Offset
0x48
Velocity-dependent offset (dimensionless). Is used if the
commanded velocity does not equal zero (i.e., if the end of the
dynamic profile has still not been reached).
0 to 32766
Kvff
0x415
Feed-forward control of the commanded velocity
0 to 32767
Aim: Minimization of the position error