





























Programming Your Application
1-109
690+ Series Frequency Inverter
Functional Description
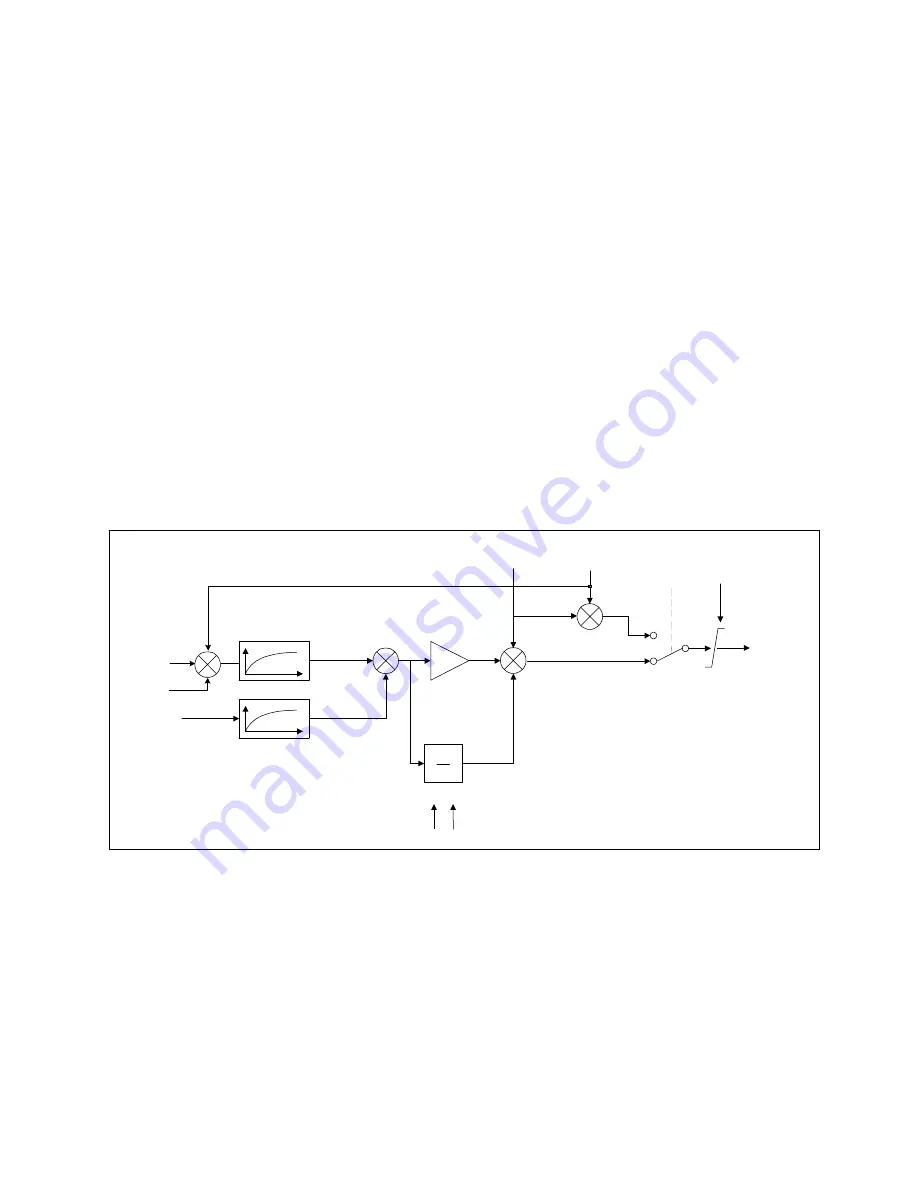
The speed error (speed demand minus speed feedback) is calculated and processed via a
propor integral (PI) controller. The output of the PI controller is a torque demand,
which is passed directly to the torque control block.
The speed demand is derived from the Setpoint Scale block. The speed feedback is derived
from the encoder when the drive is in CLOSED-LOOP VEC mode. This mode gives the best
control, as the feedback is fast and accurate. When the drive is in SENSORLESS VEC mode,
the speed feedback is calculated from the voltages and currents in the motor.
+ -
K
i
S
Integral Term
K
p
Prop Term
Lo-Pass Filter
+
+
+
+
+
Lo-Pass Filter
Speed
Demand
Speed
Feedback
Aux Torque
Demand
Integral
Preset
Integral
Defeat
Direct
Input
Clamp
Torque
Control
Speed
Control
Torque
Limits
+
+
Torque
Demand
Torque
Demand
Isolate
Phase
Input
+
Parameter Descriptions
SPEED ERROR
Range: —.00 %
Shows the difference between the demanded speed and the actual speed.
TORQUE DEMAND
Range: —.00 %
Shows the demanded motor torque as a percentage of rated motor torque.
DIRECT INPUT
Range: —.00 %
Shows the value of the Direct Input, after scaling and clamping.
PHASE INPUT
Range: —.00 %
Shows the value of the Phase PID Ouput connected internally.





















































