





























Electrical installation
Page 93
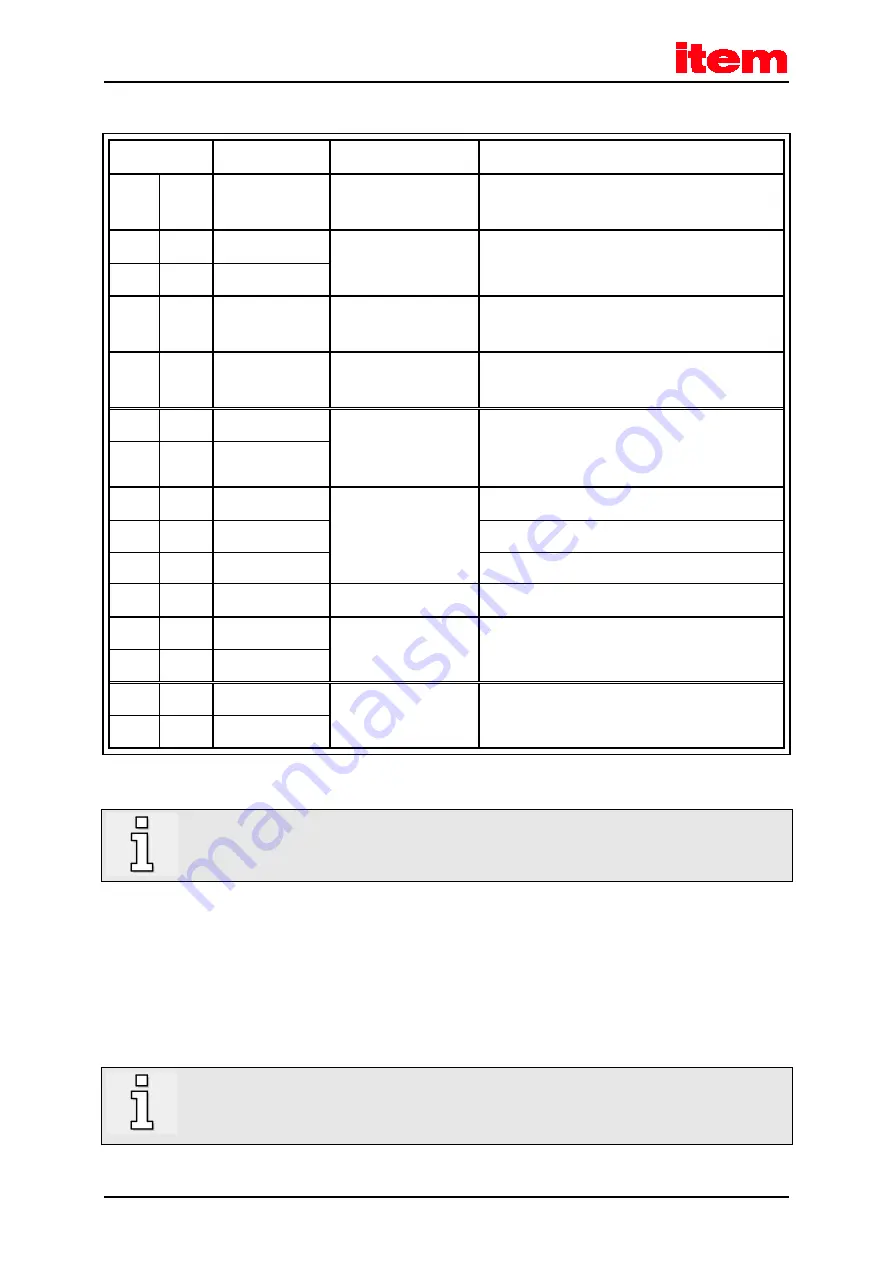
Table 40:
Pin assignment: digital incremental encoder – option [X2B]
Pin no.
Name
Value
Specification
1
MT+
+ 3.3 V / Ri = 2 k
Ω
Motor temperature sensor
1)
, normally closed contact,
PTC, KTY ...
9
5 V ... 12 V
R
I
≈
1 k
Ω
Sensor cables for the encoder supply
2
U_SENS-
10
US
5 V / 12 V /
±
10%
I
max
= 300 mA
Operating voltage for high-resolution incremental
encoders
3
GND
0 V
Reference potential for the encoder supply and motor
temperature sensor
11
N
2 V
pp
… 5 V
pp
RI
≈
120
Ω
Index pulse RS422 (differential)
of the digital incremental encoder
4
#N
12
H_U
0 V / 5 V
RI
≈
2 k
Ω
on VCC
Phase U of the Hall sensor for commutation
5
H_V
Phase V of the Hall sensor for commutation
13
H_W
Phase W of the Hall sensor for commutation
6
14
A
2 V
pp
… 5 V
pp
RI
≈
120
Ω
A track signal RS422 (differential)
of the digital incremental encoder
7
#A
15
B
2 V
pp
… 5 V
pp
RI
≈
120
Ω
B track signal RS422 (differential)
of the digital incremental encoder
8
#B
1)
Please refer to
chapter 9 Additional requirements to be fulfilled by the servo positioning controllers for UL approval
page 113.
In addition, the outer cable shield of the angle encoder cable must be connected to the mounting plate of the
controller over a large contact area with the aid of shield terminal SK14.
8.7.4
Cable type and configuration [X2B]
We recommend using the encoder connecting cables that have been approved for the product in question by the
corresponding manufacturer (Heidenhain, Sick-Stegmann, etc.). If the manufacturer does not recommend a particular cable,
we recommend configuring the encoder connecting cables as described below.
For the angle encoder supply US and GND, we recommend a minimum cross-section of 0.25 mm² for an
angle encoder cable length up to 25 m, and a minimum cross-section of 0.5 mm² for an angle encoder cable
length up to 50 m.







































































