





























ifm
System Manual
ecomat
mobile
SmartController (CR2500) V05
CAN in the ecomatmobile controller
Physical connection of CAN
51
8.3
Physical connection of CAN
The mechanisms of the data transmission and error handling described in the chapters Exchange of
CAN data (
→
) and CAN errors (
→
page
) are directly implemented in the CAN controller.
ISO 11898 describes the physical connection of the individual CAN participants in layer 1.
8.3.1
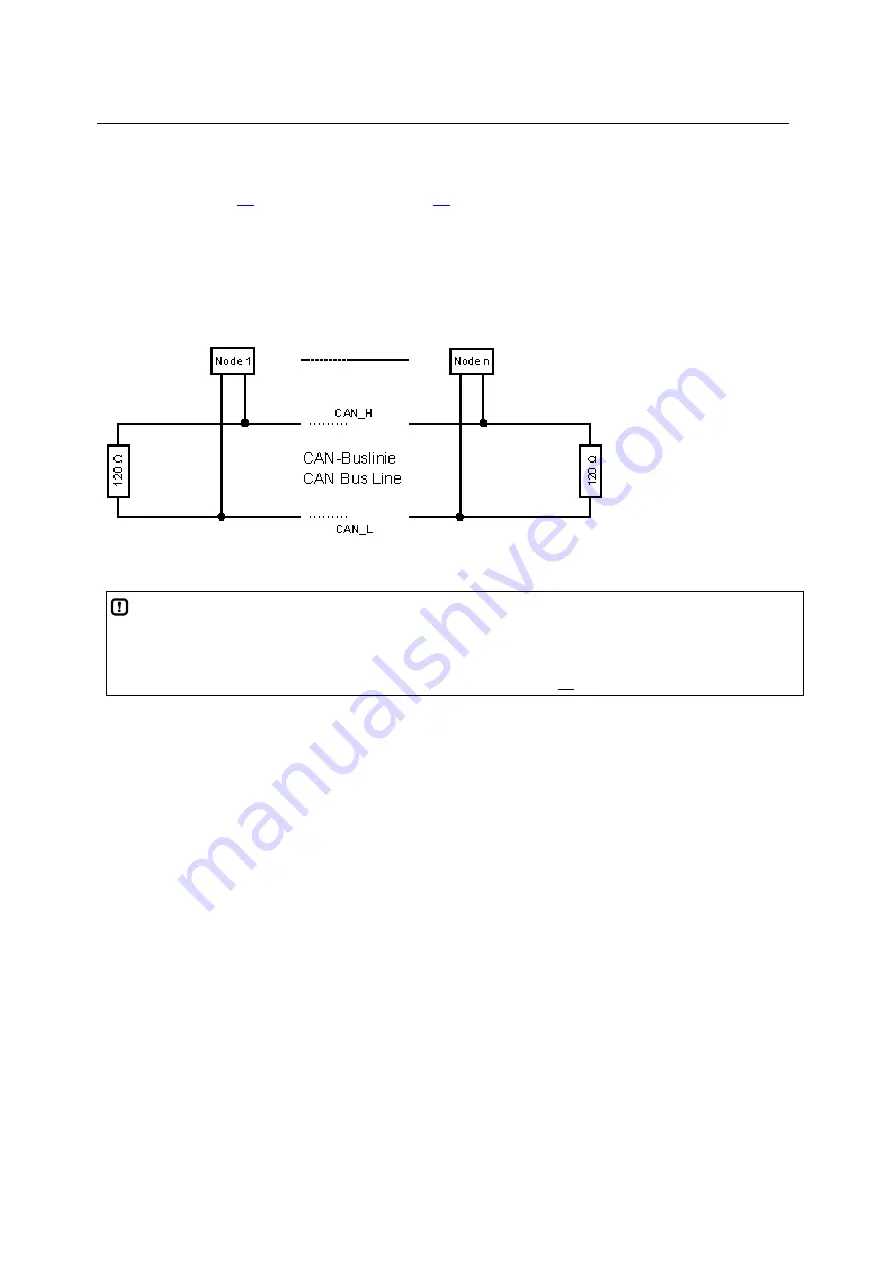
Network structure
The ISO 11898 standard assumes a line structure of the CAN network.
Figure: network structure
NOTE
The line must be terminated at its two ends using a terminating resistor of 120
Ω
to prevent corruption
of the signal quality.
The devices of
ifm electronic
equipped with a CAN interface have no terminating resistors.
Spurs
Ideally no spur should lead to the bus participants (node 1 ... node n) because reflections occur
depending on the total cable length and the time-related processes on the bus. To avoid system
errors, spurs to a bus participant (e.g. I/O module) should not exceed a certain length. 2 m spurs
(referred to 125 kbits/s) are considered to be uncritical. The sum of all spurs in the whole system
should not exceed 30 m. In special cases the cable lengths of the line and spurs must be calculated
exactly.







































































