





























258
ifm
System Manual
ecomat
mobile
SmartController (CR2500) V05
Controller functions in the ecomatmobile controller
Setting rule for a controller
11.2
Setting rule for a controller
For controlled systems, whose time constants are unknown the setting procedure to Ziegler and
Nickols in a closed control loop is of advantage.
11.2.1
Setting control
At the beginning the controlling system is operated as a purely P-controlling system. In this respect
the derivative time T
V
is set to 0 and the reset time T
N
to a very high value (ideally to
∞
) for a slow
system. For a fast controlled system a small T
N
should be selected.
Afterwards the gain KP is increased until the control deviation and the adjustment deviation perform
steady oscillation at a constant amplitude at KP = KP
critical
. Then the stability limit has been reached.
Then the time period T
critical
of the steady oscillation has to be determined.
Add a
d
ifferential component only if necessary.
T
V
should be approx. 2...10 times smaller than T
N
KP should be equal to KD.
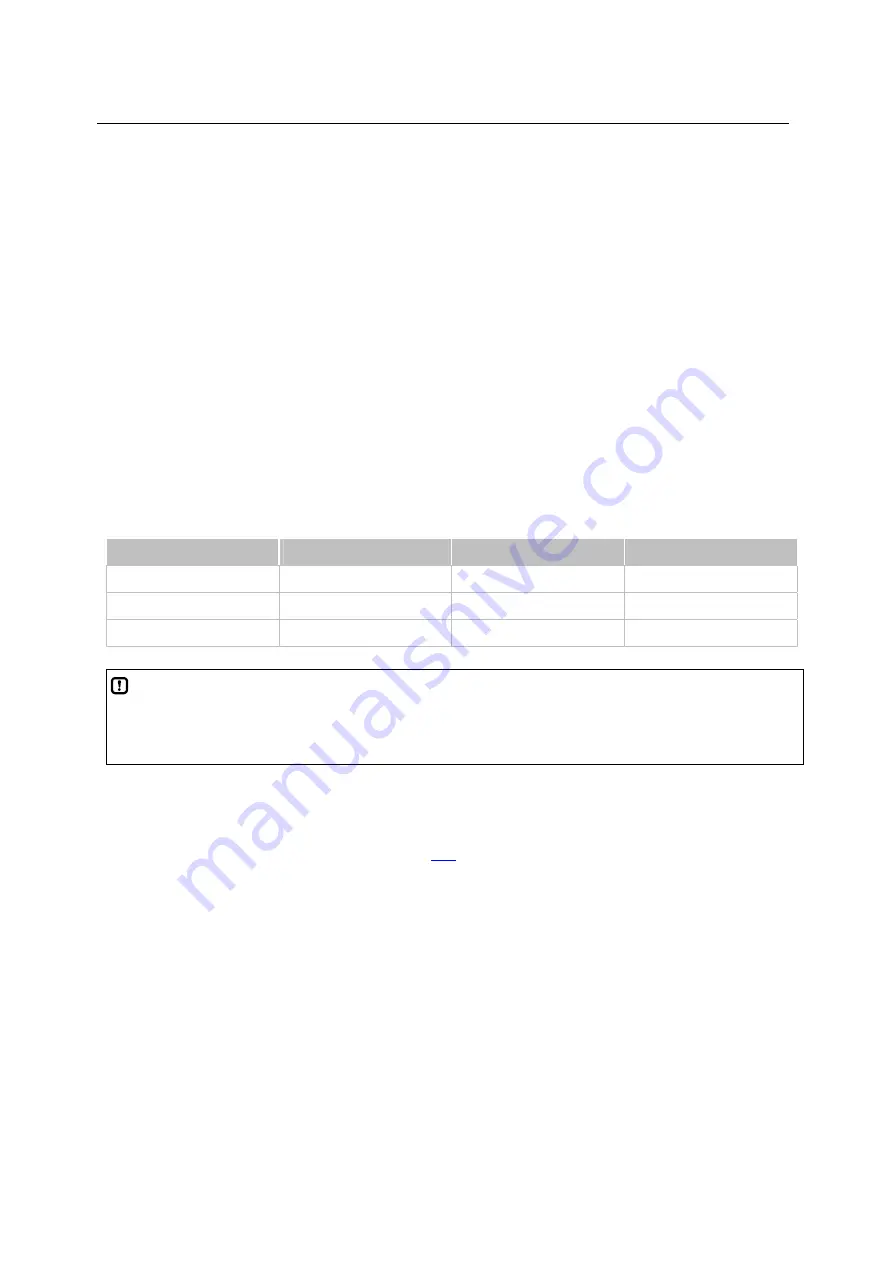
Idealised setting of the controlled system:
Control unit
KP = KD
TN
TV
P
2.0 * KP
critical
––
––
PI
2.2 * KP
critical
0.83 * T
critical
––
PID
1.7 * KP
critical
0.50 * T
critical
0.125 * T
critical
NOTE
For this setting process it has to be noted that the controlled system is not harmed by the oscillation
generated. For sensitive controlled systems KP must only be increased to a value at which no
oscillation occurs.
11.2.2
Damping of overshoot
To dampen overshoot the function PT1 (
→
) (low pass) can be used. In this respect the
preset value XS is damped by the PT1 link before it is supplied to the controller function.
The setting variable T1 should be approx. 4...5 times greater than TN (of the PID or GLR controller).







































































