



























Chapter 6 Function Introduction
Shenzhen Hpmont Technology Co., Ltd.
- 70 -
HD3N Series User Manual V1.1
Ref. code
Function Description
Setting Range [Default]
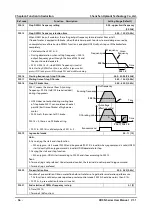
F09.11
Slip compensation limit of motor
0.0 - 250.0 [200.0%]
The motor slip changes with the load torque, which results in the variance of motor speed. Reduce the
influence through slip compensation.
•
Electric and generating state can increase slip compensation (F09.09) gradually.
•
Slip compensation limit is fixed value within constant torque. It increases in proportion to output
frequency within constant power.
•
Auto slip compensation depends on rated slip of motor. User should properly set rated frequency
(F08.03) and rated rpm (F08.04).
Range of slip compensation = actual slip compensation limit× rated slip
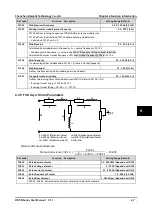
F09.12
Motor iron loss
0.000 - 9.999kW [Depend on HD3N]
F09.12 is used for slip compensation under V/f control. F09.12 has been set according to rated power of
motor. In general, user does not need to set F09.12 but can set if user can get iron loss value from test report
of motor.
F09.14
AVR (automatic voltage regulation) function of motor
0 - 2 [1]
0: Disabled.
1: Enabled all the time.
2: Disabled in Dec process.
•
The output voltage can be regulated to maintain constant via AVR. Thus, normally the AVR function
should be enabled, especially when the input voltage is higher than the rated voltage.
•
In Dec process, if F09.14 = 0 or 2, the running current will be a little higher; while if F09.14 = 1, the motor
will decelerate steadily and the current will be smaller.
F09.15
Low frequency oscillation-suppression of motor
0 - 200 [50]
F09.16
High frequency oscillation-suppression of motor
0 - 200 [20]
This function is used to suppress the existed oscillation when inverter works with motor.
•
If output current changes repeatedly when inverter runs with constant load, user can adjust F09.16 to
depress oscillation to keeprunning smoothly.
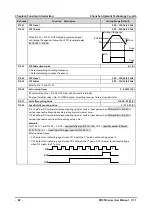
F09.17
Energy saving control selection
0 - 3 [0]
0: Invalid.
3: Enabled according to output current. When F09.17 = 3 and V/f control mode (F00.01 = 0):
•
When output frequency ≥ F09.19 and output current ≤ F09.20
×
rated current of HD3N, enter energy
saving mode.
•
If neither of above conditions is met, exit energy saving mode.
Note: Energy saving mode is valid in constant state only.
F09.18
Motor energy saving coefficient
0.0 - 100.0 [5.0%]
F09.19
Starting frequency of motor energy saving
0.00 - 50.00 [25.00Hz]
F09.20
Switching point of motor energy saving
0.0 - 100.0 [100.0%]
F09.21
Detection times of motor energy saving
0 - 5000 [10 times]
F09.22
Voltage recovery time of motor energy saving
40 - 4000 [100ms]
F09.23
Voltage decrease time of motor energy saving
40 - 4000 [100ms]
Slip
-100%
100%
Load
Positive slip
compensation
Negative slip
compensation
F09.11
F00.06
F08.03
×
F09.11
F08.03
F00.06
Output frequency
Slip compensation limit
Actual slip
compensation limit







































































