





























Shenzhen Hpmont Technology Co., Ltd.
Appendix A Parameters
HD3N Series User Manual V1.1
- 125 -
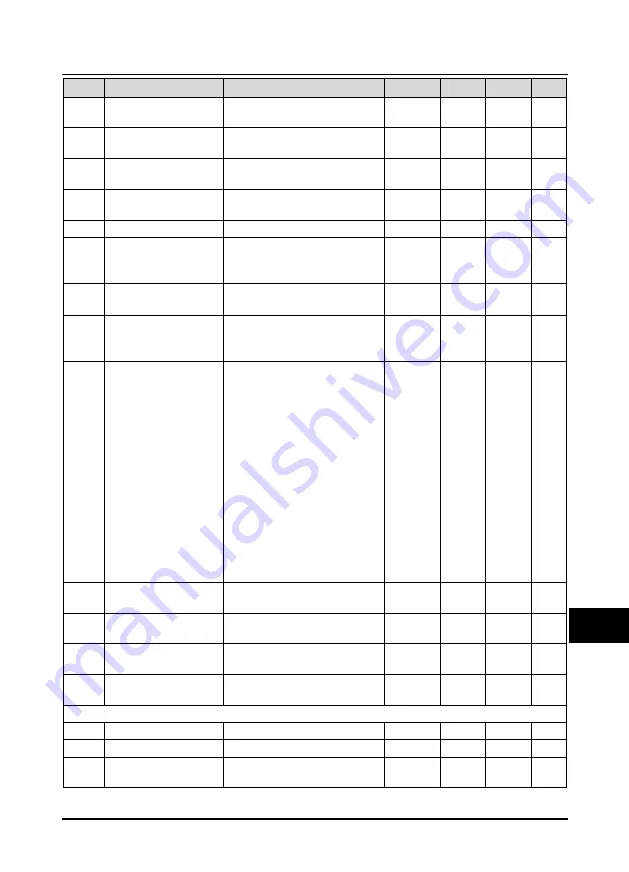
Ref. Code
Function
Setting Range
Default
Unit
Attribute Setting
F10.02
Proportional gain 2 of
motor speed control
0.1 - 200.0
10.0
0.1
○
F10.03
Integral time 2 of motor
speed control
0.00 - 10.00s
0.20s
0.01s
○
F10.04
Switching frequency 1 of
motor speed loop
0.00Hz - F10.05
10.00Hz
0.01Hz
○
F10.05
Switching frequency 2 of
motor speed loop
F10.04 - 50.00Hz
15.00Hz
0.01Hz
○
F10.06
ASR integral limit
0.0 - 200.0% (F08.02)
180.0%
0.1%
○
F10.07
Motor speed loop
differential time
0.00 - 1.00s
0.00s: There is no speed-loop
differential
0.00s
0.01s
○
F10.08
Motor speed loop otuput
filter time
0.000 - 1.000s
0.000s : The speed-loop filter is unused
0.000s
0.001s
○
F10.09
Locking selection for
motor torque limit
0: Do not lock
1: All of the torque limit is same with
FWD electric torque limit
0
1
×
F10.10
Setting channel of motor
torque
Unit: Electric torque limit channel
when motor is FWD
Ten: Electric torque limit channel
when motor is REV
Hundred: Braking torque limit
channel when motor is FWD
Thousand: Braking torque limit
channel when motor is REV
0: Limit by digital setting
1: Limit by analogue input
2: Limit by terminal pulse
3: Limit by AI1
4: Limit by AI2
7: Potentionmeter (LED keypad)
0000
1
×
F10.11
Electric torque limit when
motor is FWD
0.0 - 200.0% (F08.02)
180.0%
0.1%
○
F10.12
Electric torque limit when
motor is REV
0.0 - 200.0% (F08.02)
180.0%
0.1%
○
F10.13
Braking torque limit when
motor is FWD
0.0 - 200.0% (F08.02)
180.0%
0.1%
○
F10.14
Braking torque limit when
motor is REV
0.0 - 200.0% (F08.02)
180.0%
0.1%
○
F11: Motor Vector Control Current-loop Parameters (on pages 72 - 73)
F11.00
Current-loop KP of motor
1 - 2000
800
1
○
F11.01
Current-loop KI of motor
1 - 1000
200
1
○
F11.02
Current-loop output filter
times
0 - 31
3
1
○
A







































































