



























Shenzhen Hpmont Technology Co., Ltd.
Chapter 6 Function Introduction
HD3N Series User Manual V1.1
- 59 -
Ref. code
Function Description
Setting Range [Default]
F04.09
Sampling time (T)
0.01 - 50.00 [0.10s]
F04.04, F04.05 and F04.07 define the PID parameter.
F04.06 defines the intergral upper limit. F04.08 defines differential upper limit.
F04.09 defines sampling time of feedback value. The regulator calculates once during every sampling
period.
•
F04.07 = 0, differential does not act.
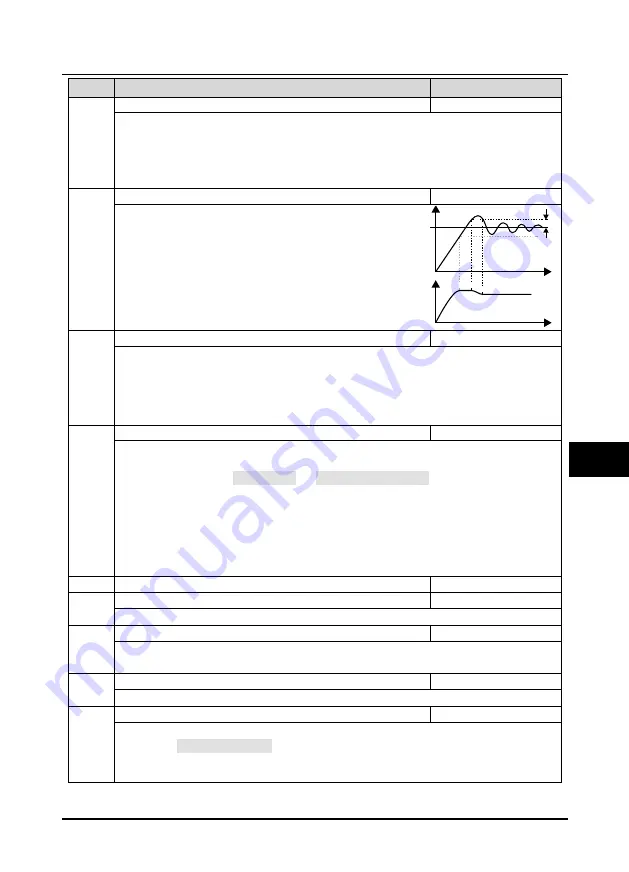
F04.10
Bias limit
0.0 - 20.0 (setting) [0.0%]
The system output value of regulator is relevant to the
max. tolerance of PID setting.
•
Within permitted range, the regulator stops regulating.
•
Proper setting of F04.10 helps keeping accuracy and
stability of system output.
•
High setting of F04.10 may cause sharply regulation of
PID, during which infinite oscillation occurs.
F04.11
Upper limit channel of PID regulator
0 - 7 [0]
When PID serves as aux frequency setting channel, F04.11is invalid, the upper limit is set by F19.35, F19.36.
0: Set by F04.13.
1: Analogue.
•
Set by analogue input voltage, refer to F16.
2: Terminal pulse.
3: AI1.
4: AI2.
7: Potentionmeter.
•
Valid when LED keypad adopted only.
F04.12
Lower limit channel of PID regulator
0 - 7 [0]
When PID serves as aux frequency setting channel, F04.12 is invalid, the lower limit = REV frequency upper
limit.
•
F04.12 is valid only when PID (F04.00 = 1) and prohibit reverse (F04.18 = 0).
0: Set by F04.14.
1: Analogue setting. Set by analogue input voltage, refer to F16.
2: Terminal pulse setting.
3: AI1.
4: AI2.
7: Potentionmeter. Valid when LED keypad adopted only.
F04.13
PID regulator upper limit
0.0 - 100.0 [100.0%]
F04.14
PID regulator lower limit
0.0 - 100.0 [0.0%]
Define output upper/lower limit of PID regulator.
F04.15
Regulating characteristic of PID regulator
0,1 [0]
0: Positive characteristic. Option when the setting is added and motor rpm increase.
1: Negative characteristic. Optional when the setting is added and motor rpm decrease.
F04.17
PID output filtering time
0.01 - 10.00 [0.05s]
Defines filtering time of PID output.
F04.18
REV selection when PID outputs
0,1 [0]
0: Prohibit REV when PID regulates. PID output < 0, 0 is the limit.
1: Permit REV. F00.18 = 1 (prohibitted), 0 is the limit.
•
When PID serves as aux frequency setting channel, PID can reverse by default. Setting of F04.18 is
invalid.
Feedback value
Pre-given value
Time
Time
Out frequency
F04.10
6







































































