


























Chapter 6 Function Introduction
Shenzhen Hpmont Technology Co., Ltd.
- 98 -
HD3N Series User Manual V1.1
6.2.19
F21: Torque Control Parameter
Under open loop control, set F00.00 = 1 (torque control), group F21 controls motor torque output.
Under torque control, if the output torque is not balanced with load torque, motor will accelerate or
decelerate.
In electric state, motor running speed is limited by F21.04. In generating state, motor running speed
changed along with load speed.
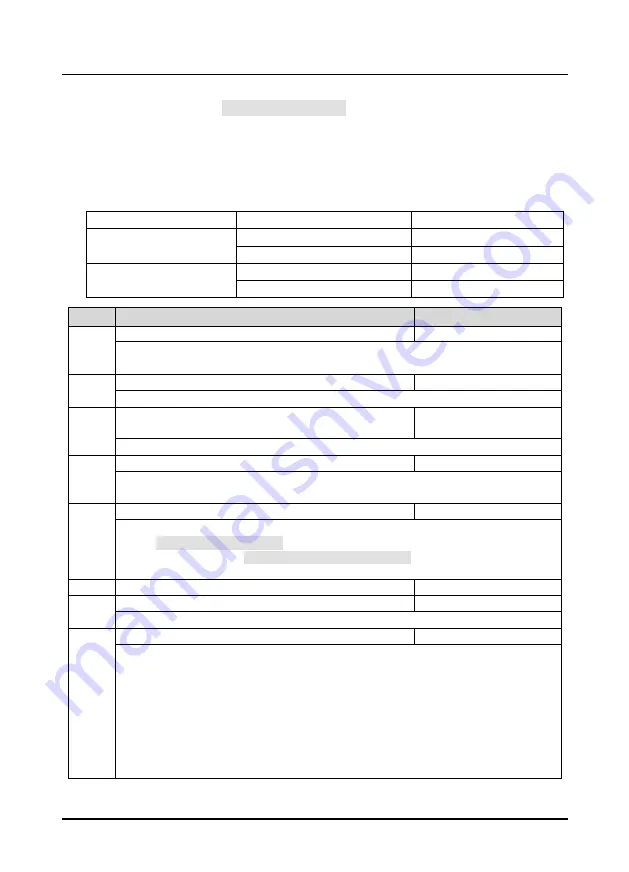
Internal torque command depends on combination of running command and torque setting.
Running command
N/P of torque setting
Internal torque command
Forward
Positive
Forward
Negative
Reverse
Reverse
Positive
Reverse
Negative
Forward
Ref. code
Function Description
Setting Range [Default]
F21.00
Torque command setting source selection
0 - 3 [0]
0: F21.01 digital.
1: Analogue.
2: Terminal puls.
3: SCI communication.
F21.01
Torque command digital setting
-100.0 - 100.0 (F21.02) [0.0%]
Defines the torque setting value when F21.00 = 0.
F21.02
Max. torque setting
0.0 - 500.0 (rated torque of
motor) [100.0%]
Defines the max. output torque.
F21.03
Filtering time of torque command
0.000 - 1.000 [0.000s]
F21.03 is the time that external torque is filtered through the filter setting source.
•
Suitable filtering time can avoid motor jitter due to the change of torque command.
F21.04
Speed control under torque control
0 - 2 [1]
0: Set by F21.05 and F21.06.
1: Set by F00.06 (max. output frequency).
2: Set by analogue limit. When analogue input terminal (F16.01 - F16.04) = No. 15,F21.04 is set by analogue
limit.
F21.05
Forward speed limit under torque control
0 - 100 (F00.06) [100%]
F21.06
Reverse speed limit under torque control
0 - 100 (F00.06) [100%]
F21.05,F21.06 define forward/reverse speed under torque control (F00.00 = 1).
F21.10
Stop mode selection under torque control
0 - 2 [0]
0: Decelerates to stop + DC brake.
•
When receiving stop command, the output frequency decelerates according to dec time, when output
frequency = F02.16, DC brake start acting.
•
Refer to F02.16 - F02.18 for DC brake function.
1: Stop torque output.
•
When receiving stop command, HD3N stops torque output, and motor moves due to the load.
2: Coast to stop.
•
When receiving stop command, HD3N stops output immediately, and motor coast to stop according to
mechanical inertia.







































































