





























EVCO S.p.A.
EVDRIVE04 | User manual ver. 1.1 | Code 144EPD4I114
Page 22 of 78
6.2
Operating mode
6.2.1
Preliminary information
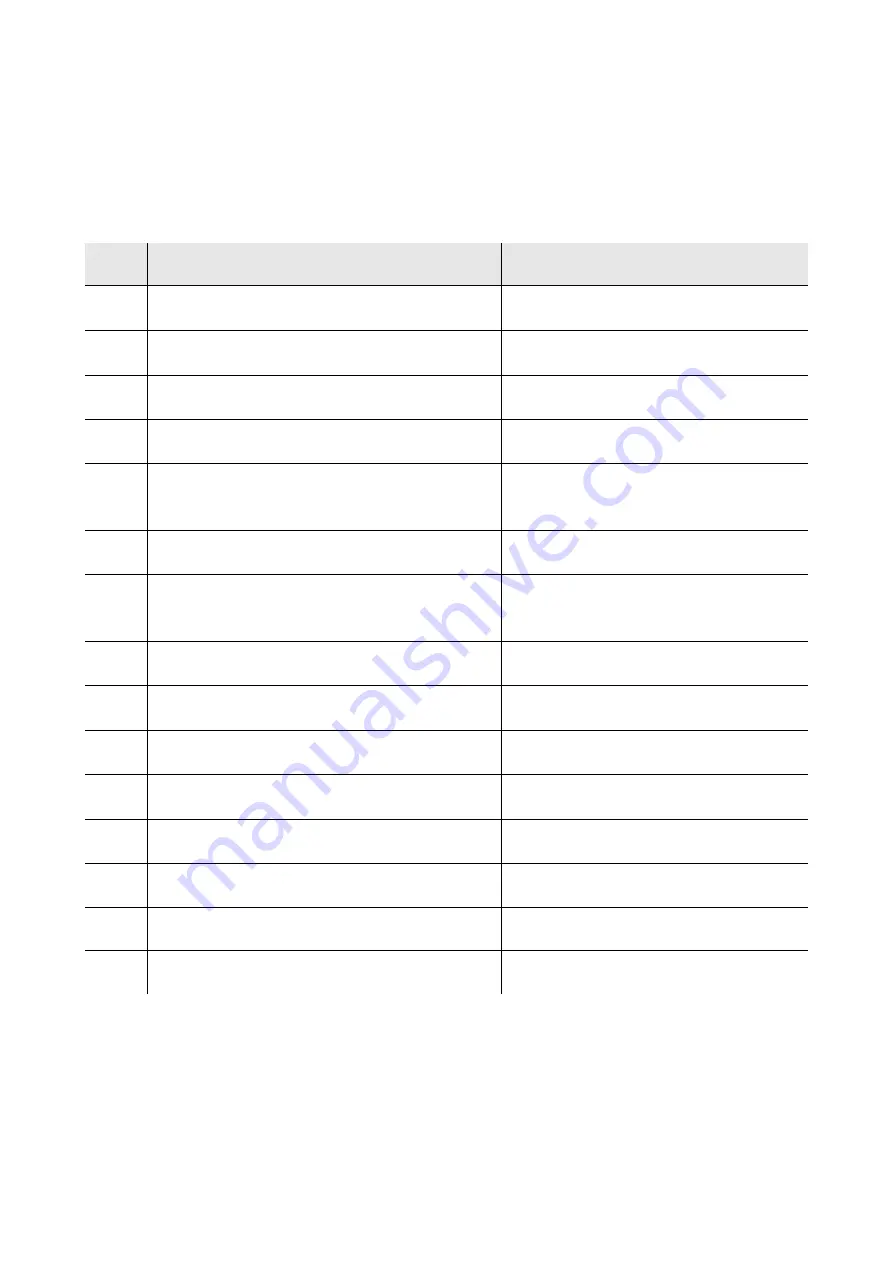
EVDRIVE04 implements a stepper motor control according to the state machine presented in the table here below
(hereinafter the document will make reference to these status).
The state in which the algorithm is in may be readable in the FSM status (Finite State Machine, parameter Stat).
FSM
Meaning
0
initialization
- Valve parameters acquisition
- Request valve synchronization
1
synchronization wait
- Awaiting completion of synchronization
- Request positioning to 0%
2
positioning wait
- Awaiting end of positioning
- Positioning to Pr20
3
probe alarm
- Awaiting resolution of probe alarm
- Positioning to Pr05
4
grid alarm
- Awaiting resolution of power supply alarm
- Safe shutdown requested if backup battery is
operative
5
communication alarm
- Awaiting positioning to communication alarm
- Positioning to Pr48
10
stand-by off
- Evaluating resynchronization request flag
- Acquisition of relevant parameters
- Verifying consistency of parameters
11
stand-by on
- Evaluating Pr01 parameter to start the right
valve control
30
analog positioner
- Analog positioner control in according to Pr01
selection
40
stabilization
- Positioning at stabilization position
- Wait stabilization delay
41
start-up
- Positioning at start-up position
- Wait start-up delay
42
algorithm selection
- Control algorithm selection
- Set PID initializing request
50
manual
- Valve controlled in manual mode
51
debugger
- Debugging function active
61
SH or HGB algorithm
- Valve parameters acquisition
- Request valve synchronization







































































