





























EM15 User’s Manual
5. Description of Function Codes
47
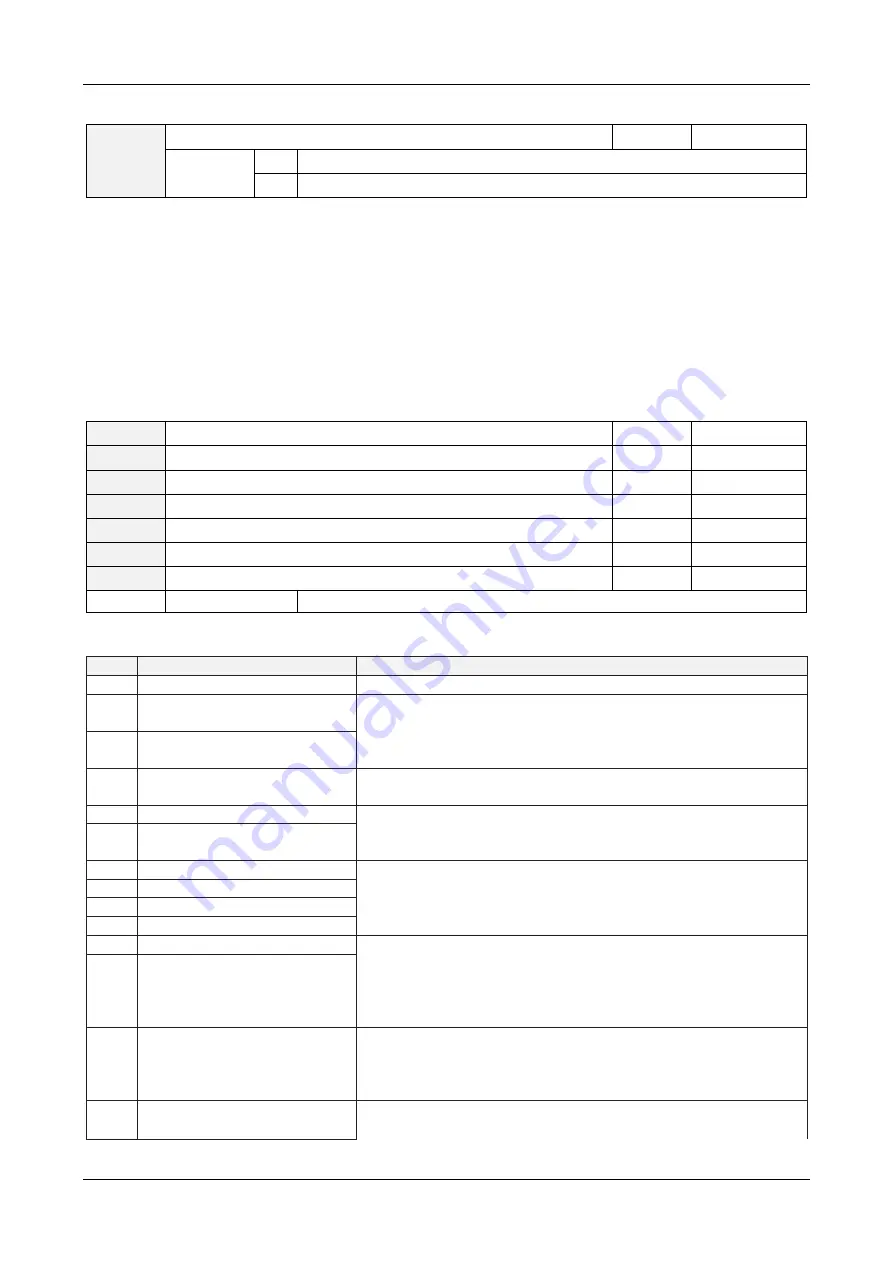
b2-32
DI terminal status after power on
Default
0
Setting
Range
0
Valid
1
Invalid
This parameter is used to enable the frequency inverter safety protection. If it is set to 1, the frequency inverter does
not respond to the run command after power-on (for example, an input terminal is ON before power-on). The
frequency inverter responds only after the run command is cancelled and becomes valid again.
In addition, the frequency inverter does not respond to the run command valid from fault reset of the frequency
inverter. The run protection can be disabled only after the run command is cancelled one time.
In this way, the motor will not automatically startup to avoid unexpected dangerous conditions for these startup
commands from power-on and fault reset.
5.4 Group b3: Input Terminals
The EM15 provides 6 digital input (DI) terminals (HDI can be used for high-speed pulse input) and 3 analog input
(AI) terminals.
b3-00
DI1 function selection
Default
01(FWD)
b3-01
DI2 function selection
Default
02(REV)
b3-02
DI3 function selection
Default
06
b3-03
DI4 function selection
Default
07
b3-04
DI5 function selection
Default
38
b3-05
Reserved control terminal for expansion
Default
0
b3-06
HDI function selection
Default
32
Setting Range
b3-00~b3-06: 0~49
The following table lists the functions available for the DI terminals.
Table 5-1 Functions of DI terminals
Value
Function
Description
0
No function
Set 0 for reserved terminals to avoid malfunction.
1
Forward RUN (FWD) or running
command
The terminal is used to control forward or reverse running of the
frequency inverter.
2
Reverse RUN (REV) or the
direction of FWD/REV
3
Three-line control
The terminal determines three-line control of the frequency inverter.
For details, see the description of b3-13.
4
Forward JOG (FJOG)
FJOG indicates forward JOG running, while RJOG indicates reverse
JOG running. The JOG frequency, acceleration time and deceleration
time are described respectively in b2-00, b2-01 and b2-02.
5
Reverse JOG (RJOG)
6
Multi-function terminal 1
The setting of 16 speeds or 16 other references can be implemented
through combinations of 16 states of these four terminals.
7
Multi-function terminal 2
8
Multi-function terminal 3
9
Multi-function terminal 4
10
Terminal UP
If the frequency is determined by external terminals, the terminals
with the two functions are used as increment and decrement
commands for frequency modification.
When the frequency source is digital setting, they are used to adjust
the frequency.
11
Terminal DOWN
12
UP and DOWN setting clear
(terminal, operation panel)
If the frequency source is digital setting, the terminal is used to clear
the modification by using the UP/ DOWN function or the
increment/decrement key on the operation panel, returning the set
frequency to the value of b0-12.
13
Terminal 1 for acceleration/
deceleration time selection
Totally four groups of acceleration/deceleration time can be selected
through combinations of two states of these two terminals.







































































