





























II K 6-28
Operating Instructions
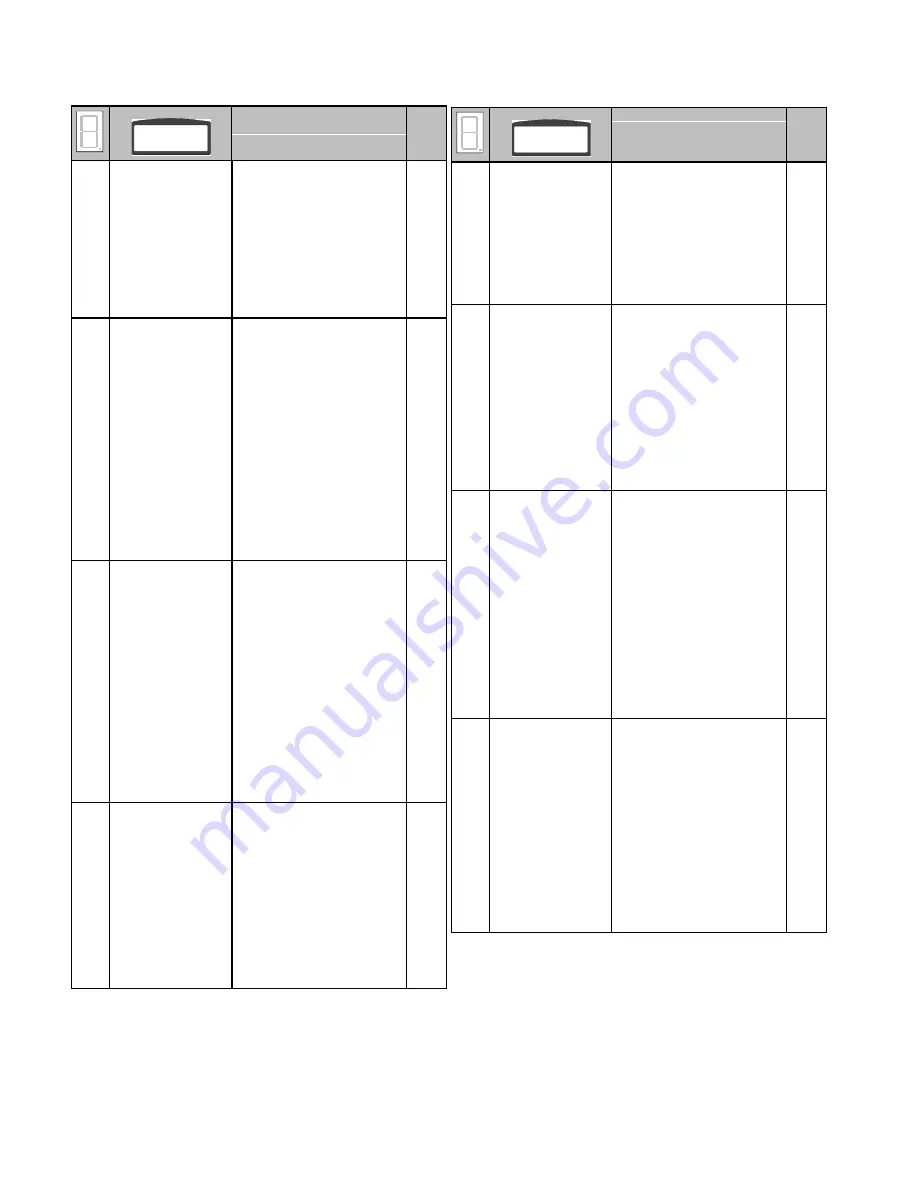
Fault message
Fault no.
Definition /
Possible source
Pa
ra
m.
F 17
Tacho Polarity Fault
Tacho Polarity Fault
Polarity of feed back signal from
tacho generator incorrect.
Please check
•
the polarity of tacho gene-
rator cable
•
polarity of armature and field
cable
•
direction sense of rotation of
the motor
7.10
bit 0
F 18
Overspeed
Overspeed
The actual speed of motor too
high.
Possible causes:
•
Running in torque/current
controlled mode instead of
speed controlled.
•
Speed regulator parameters
are not correct (overshoot or
instability , see Parameter
Group 5
)
•
Motor driven by external
load.
7.10
bit 1
F 19
Motor Stalled
Motor Stalled
Motor not turning at zero speed
level (Parameter
Zero Speed
Lev (5.15))
with actual torque
higher than the torque limit (Pa-
rameter
Stall Torque (3.17)
) for
a time longer than the limiting
time (Parameter
Stall Time
(3.18
)).
Please check
•
all mechanical couplings of
the motor
•
the proper condition of load
•
current/torque
limitation
•
parameter settings (
Group
3
)
7.10
bit 2
F 20
Communication Fault
see also
A11
Communication Fault
if
command location
Parameter
2.02
is set to „Fieldbus“. Field-
bus communication errors ap-
pear if no messages have been
received for longer than the time
which is set in Parameter
Comm
Fault Time (2.08)
. If command
location is
not
„Fieldbus“ Alarm
11 appears instead.
Please check the connection of
Fieldbus cable and check the
function of all Fieldbus devices
according to the values in Para-
meter
Group 8
7.10
bit 3
Fault message
Fault no.
Definition /
Possible source
Pa
ra
m.
F 13
Field Overcurrent
Field Overcurrent
Field current has reached a limit
(Parameter
Field Ov Cur Trip
(4.05
)) that could damage the
motor.
Please check
•
the field related parameters
•
the resistance of the field
•
connections of the field
•
insulation level of cable and
field winding
7.09
bit 12
F 14
Armature
Overcurrent
Armature Overcurrent
Armature current higher than
value of Parameter
3.04 Arma-
ture current max
. The problem
can be caused by a short circuit
in the armature circuit or a thyri-
stor is defective.
Please switch off the drive and
check
•
measure the resistance of
armature
•
all connections in the arma-
ture circuit
•
function of all thyristors
•
parameters of the Current
Controller (
Group 3
) for in-
stability.
7.09
bit 13
F 15
Armature
Overvoltage
Armature Overvoltage
The voltage of the armature has
grown higher than the value in
Parameter
Arm Overv Trip
(1.09)
.
Possible problems:
•
Too low fault level set (con-
sider voltage overshoots) or
wrong nominal motor voltage
•
Too high field current, may-
be problems with field wea-
kening (see field parame-
ters)
•
Overshoot or instability of
speed/armature current con-
troller
•
Overspeed
7.09
bit 14
F 16
Speed Meas Fault
Speed Measurement Fault
The comparison of the speed
feed back signal from the tacho
generator or pulse encoder has
failed or overflow of analogue
input AITAC.
Please check
•
all connections of tacho ge-
nerator or
pulse encoder
•
encoder
supply
•
converter connections - ar-
mature ciruit open?
7.09
bit 15
Summary of Contents for DCS 400
Page 24: ...II K 3 14 Technical data ...
Page 29: ...II K 4 5 Overview of Software ...
Page 158: ...II K 6 36 Operating Instructions ...
Page 181: ...II K B 1 Appendix B Declaration of conformity ...
Page 190: ...Notices ...
Page 191: ...Notices ...





















































