




























5.2 Advanced Autotuning (Fn201)
5-13
5
Adjustments
(2) Failure in Operation
When "NO-OP" Flashes on the Display
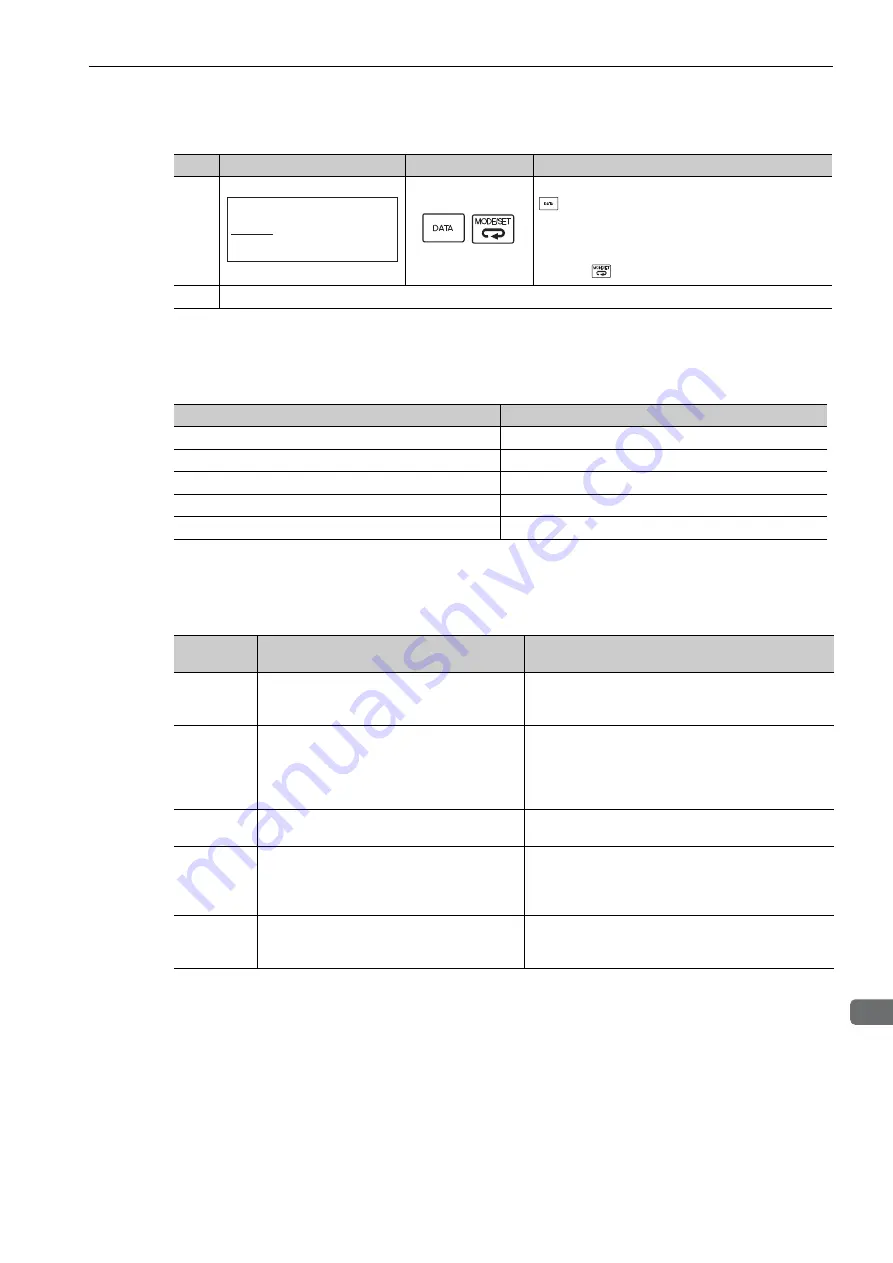
When an Error Occurs during Calculation of Moment of Inertia
The following table shows the probable causes of errors that may occur during the calculation of the moment
of inertia with the Jcalc set to ON, along with corrective actions for the errors.
7
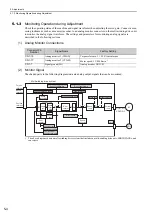
After the servomotor is temporarily stopped, press the
Key to save the calculated moment of inertia
ratio in the multi-winding drive unit.
“DONE” will flash for one second, and “ADJ” will
be displayed again.
Press the
Key to end the operation.
8
Turn the control power supply OFF and ON again.
(cont’d)
Step
Display after Operation
Keys
Operation
㹀㹀ࠉࠉࠉࠉࠉࠉ̿㹄㹓㹌㹁㹒㹇㹍㹌̿
㹄㹬㸮㸯㹃㸸㹑㹴㹋㹭㹲㹍㹮ࠉ㹇㹂
㹄㹬㸰㸮㸯㸸㸿㸿㹒
㹄㹬㸰㸮㸱㸸㹍㹬㹣㹎㹰㹫ࠉ㹒㹳㹬
㹄㹬㸰㸮㸲㸸㸿㸫㹔㹧㹠ࠉ㹑㹳㹮
Probable Cause
Corrective Actions
The main circuit power supply was OFF.
Turn ON the main circuit power supply.
An alarm or warning occurred.
Remove the cause of the alarm or the warning.
Overtraveling occurred.
Remove the cause of the overtravel.
Gain setting 2 was selected by gain switching.
Disable the automatic gain switching.
The HWBB function operated.
Disable the HWBB function.
Error
Display
Probable Cause
Corrective Actions
Err1
The multi-winding drive unit started calculating
the moment of inertia, but the calculation was
not completed.
• Increase the speed loop gain (Pn100).
• Increase the STROKE (travel distance).
Err2
The moment of inertia fluctuated greatly and
did not converge within 10 tries.
Sometimes it is not possible to calculate the moment of
inertia.
Set the calculation value based on the machine specifi-
cations in Pn103 and use one-parameter tuning (Fn203)
for tuning.
Err3
Low-frequency vibration was detected.
Double the set value of the moment of inertia calculat-
ing start level (Pn324).
Err4
The torque limit was reached.
• When using the torque limit, increase the torque
limit.
• Double the set value of the moment of inertia calcu-
lating start level (Pn324).
Err5
While calculating the moment of inertia, the
speed control was set to proportional control by
setting 1 to V_PPI in the OPTION field.
Operate the multi-winding drive unit with PI control
while calculating the moment of inertia.
Содержание Sigma-V JUSP-MD D A Series
Страница 21: ...xxi Index Index 1 Revision History ...







































































