





























The motion module uses 60byte input and 60byte output data.
Head module
Backplane bus
Motion module
CPU respectively bus cou-
pler
à
ß
Process data
Acyclic channel
60byte
The data exchange with the motion module must be consistent across
the 60 bytes! It is recommended to control it via the process image.
4.1.1 DC motor module
The FM 054-1CB00 integrates a compact motion control solution for direct control of two
DC motors in a very compact design. DC motors are easy to control because the speed is
proportional to the voltage. The controlling of the current happens by means of PWM with
a clock speed of 32kHz. By connecting an encoder per drive and the integration into the
control circuit, the implementation of simple axes is possible. The power stage has an
overload and short circuit protection.
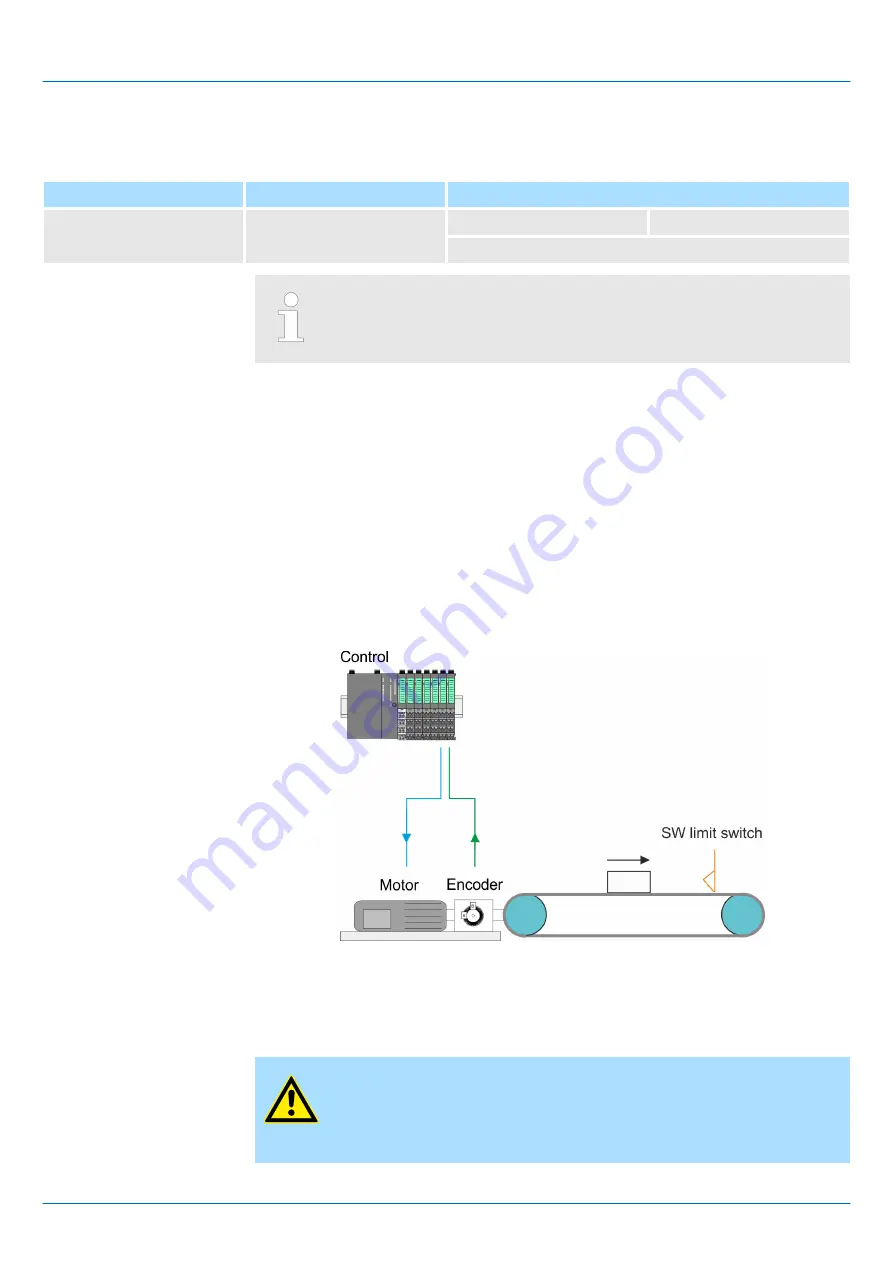
4.1.2 Structure of a positioning control
The figure below shows the structure of a typical positioning control
The
Control
consists of the PLC with the user program for the processing and the motion
module to control the drive. The motion module has an integrated power stage. This gen-
erated from the module signals the required drive currents. You can define a software
limit switch in the motion module and react in the user program on the overrun.
CAUTION!
Please provide for track limits (general position limit) respectively to avoid
damages besides software limit switch hardware limit switches and also
consider this in your safety concept.
Overview
Structure
Control
VIPA System SLIO
Deployment
Basics > Structure of a positioning control
HB300 | FM | 054-1CB00 | en | 18-06
44