





























6-
14
Parallel I/O interface
6
1. Standard I/O interface overview
1.8.4
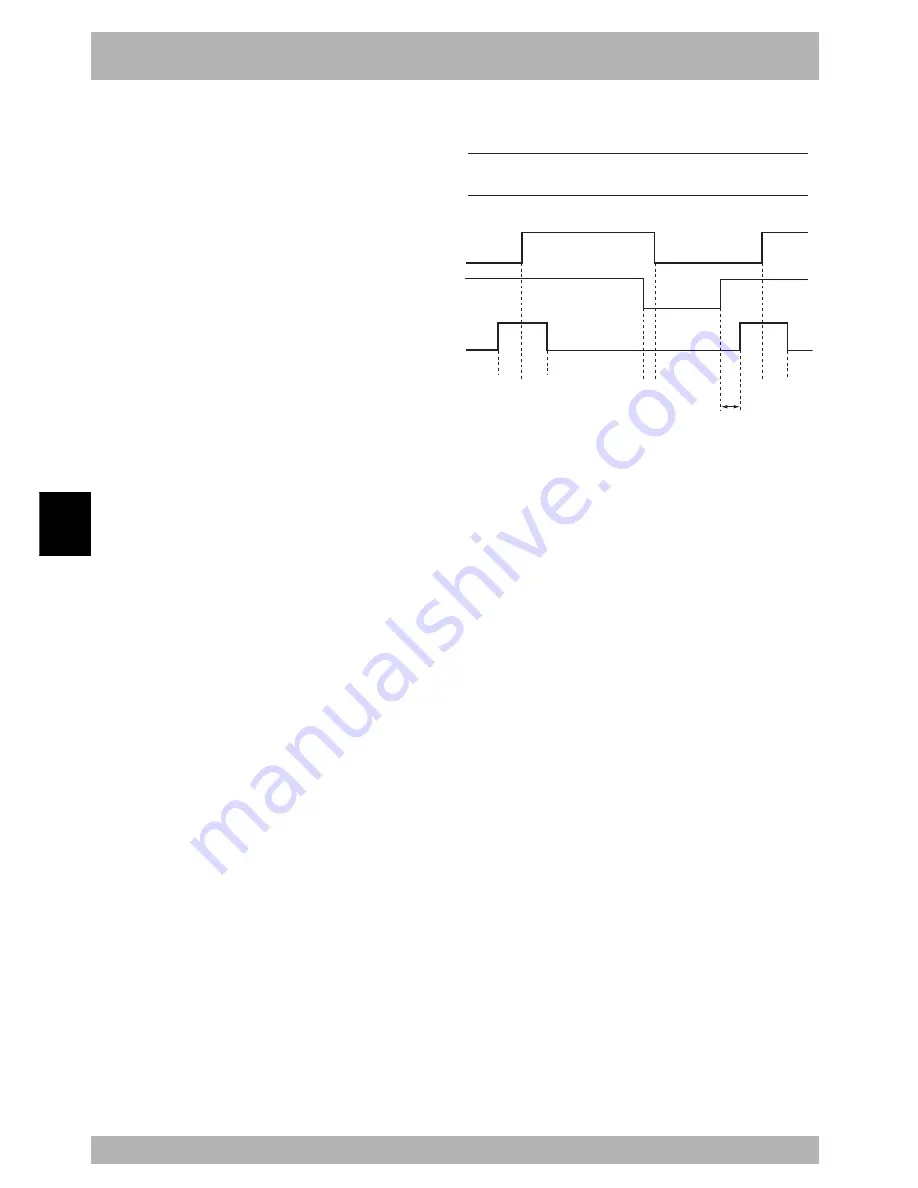
Stopping due to program interlocks
on
AUTO mode output: DO(10)
off
on
Return-to-origin complete
output: DO(11) off
on
Robot program-in-progress
output: DO(13) off
on
Interlock input: DI(11)
off
on
Program start input: DI(12)
off
a ) b ) c ) d ) e ) f ) g ) h ) i )
100ms or more
Program execution
a) Program start input turns on.
b) Robot program-in-progress output turns on.
c) Program start input turns off after checking robot program-in-progress output is turned
on.
Program stop due to interlock
d) Interlock input turns off.
e) Robot program-in-progress output turns off.
Program execution after stopping program due to interlock input
f) Interlock input turns on.
g) Program start input turns on.
h) Robot program-in-progress output turns on.
i) Program start input turns off after checking that the robot program-in-progress output
is turned on.
* Program will stop if switching to emergency stop. An alarm is output at this time and
the servo-ON output turns off. The servo must be turned on to execute the program
again.
c
CAUTION
• When the program stops during
execution by input of DI11 signal
(Interlock input) or other
reasons, the program re-executes
the command that has stopped.
Keep this point in mind when re-
executing the program with DI12
signal (Program start).
Содержание RCX142
Страница 1: ...User s Manual ENGLISH E YAMAHA 4 AXIS ROBOT CONTROLLER E92 Ver 1 09 RCX142 ...
Страница 2: ......
Страница 18: ...MEMO ...
Страница 24: ...1 6 MEMO ...
Страница 26: ...MEMO ...
Страница 36: ...MEMO ...
Страница 300: ...4 238 MEMO ...
Страница 302: ...MEMO ...
Страница 336: ...MEMO ...
Страница 360: ...6 24 MEMO ...
Страница 362: ...MEMO ...
Страница 374: ...MEMO ...
Страница 384: ...8 10 MEMO ...
Страница 386: ...MEMO ...
Страница 394: ...MEMO ...







































































