





























4-
101
4
Operation
11. “MANUAL” mode
7) Enter the number of points NY and NZ (only when “3-D” is selected) as in step 6).
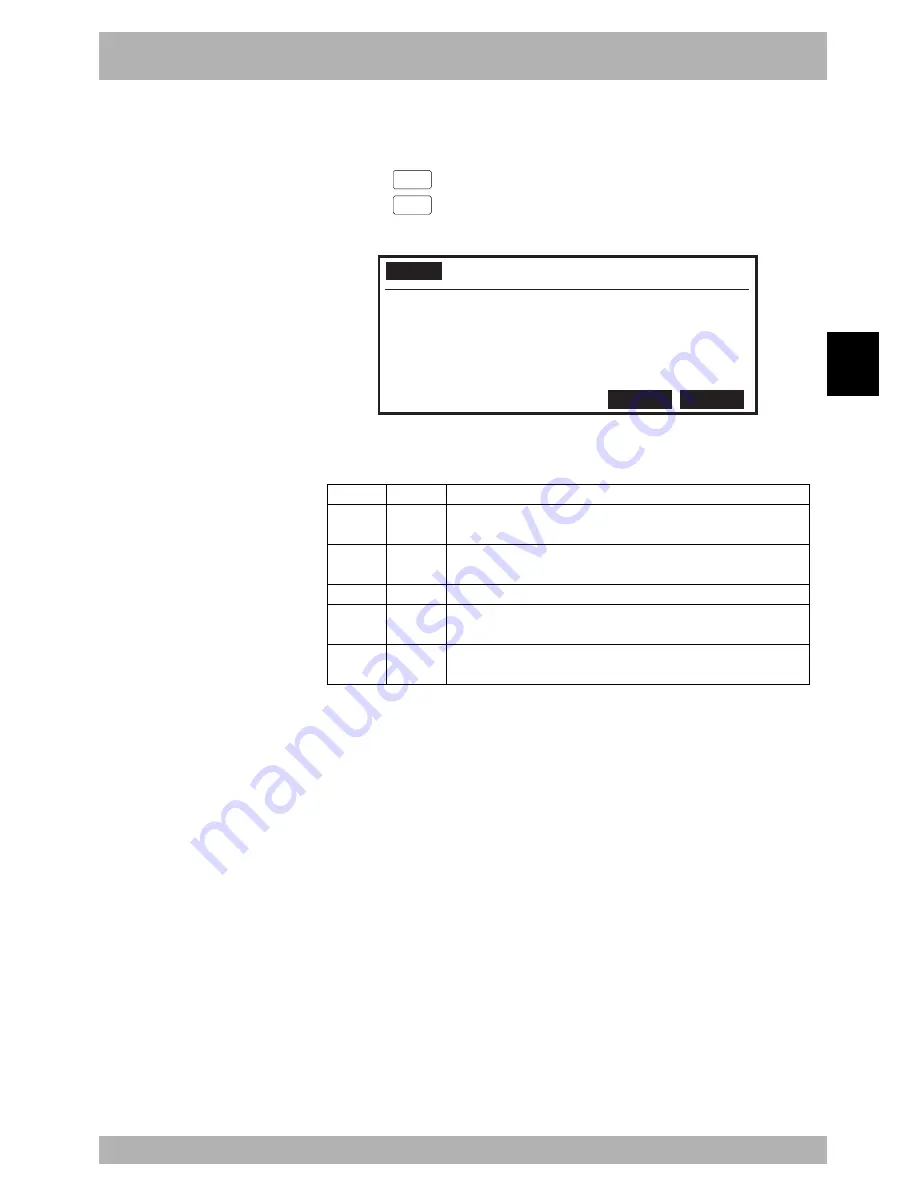
8) A confirmation message then appears after setting the number of points.
Press the
F 4
(YES) key to determine the setting.
Press the
F 5
(NO) key if you want to cancel the setting.
Fig. 4-11-46
MANUAL
>PALLET>METHOD 50%[MG][S0H0X]
PALLET NO.=PL0 [XY]
Used point =P3996-P4000
NX = 5
NY = 9
NZ = 3
Set OK?
YES
NO
Valid keys and submenu descriptions in “MANUAL>PALLET>METHOD” mode are
shown below.
F4
F5
F8
F9
F10
Valid keys
VEL+
VEL-
UNITCHG
VEL++
VEL--
Menu
Function
Increases manual movement speed for the selected robot group in steps.
(1
→
5
→
20
→
50
→
100 %)
Decreases manual movement speed for the selected robot group in steps.
(100
→
50
→
20
→
5
→
1 %)
Switches between the current display units (mm or pulses).
Increases manual movement speed for the selected robot group in 1%
increments.
Decreases manual movement speed for the selected robot group in 1%
decrements.
n
NOTE
• Each pallet is generated with 5
points for pallet definition.
• The 5 points should be defined in
order from P[1] to P[5]. See
“11.3 Displaying, editing and
setting pallet definitions”.
Содержание RCX142
Страница 1: ...User s Manual ENGLISH E YAMAHA 4 AXIS ROBOT CONTROLLER E92 Ver 1 09 RCX142 ...
Страница 2: ......
Страница 18: ...MEMO ...
Страница 24: ...1 6 MEMO ...
Страница 26: ...MEMO ...
Страница 36: ...MEMO ...
Страница 300: ...4 238 MEMO ...
Страница 302: ...MEMO ...
Страница 336: ...MEMO ...
Страница 360: ...6 24 MEMO ...
Страница 362: ...MEMO ...
Страница 374: ...MEMO ...
Страница 384: ...8 10 MEMO ...
Страница 386: ...MEMO ...
Страница 394: ...MEMO ...







































































