





























5-
11
5
T
wo-robot setting
2. Operations and data when using the two-robot setting
2.2.4.1
Setting the point in pallet definition by teaching
Setting the point in pallet definition by teaching consists of registering the currently selected
group's coordinates as point data.
Before executing this function, be sure to verify the currently selected group. The selected
group can be changed by the same procedure as that described in section "2.2.3.1 Point
data input by teaching".
2.2.4.2
Pallet definition by teaching
The "Pallet definition by teaching" function allows the pallet definition data to be specified
by teaching 4 points (5 points for 3D pallets), and then specifying that pallet's number of
rows/columns (rows/columns/levels for 3D pallets).
Point teaching is performed for the currently selected group, and the pallet data definition
data is set based on that point data.
[Procedure]
1) In the "MANUAL>PALLET" mode, use the cursor up/down (
↑
/
↓
) keys to select the
desired pallet number.
2) Press the (
LOWER
+
MODE
) robot keys to toggle between the groups (the selected
group is displayed). An "[MG]" display indicates the main group, and "[SG]"
indicates the sub group.
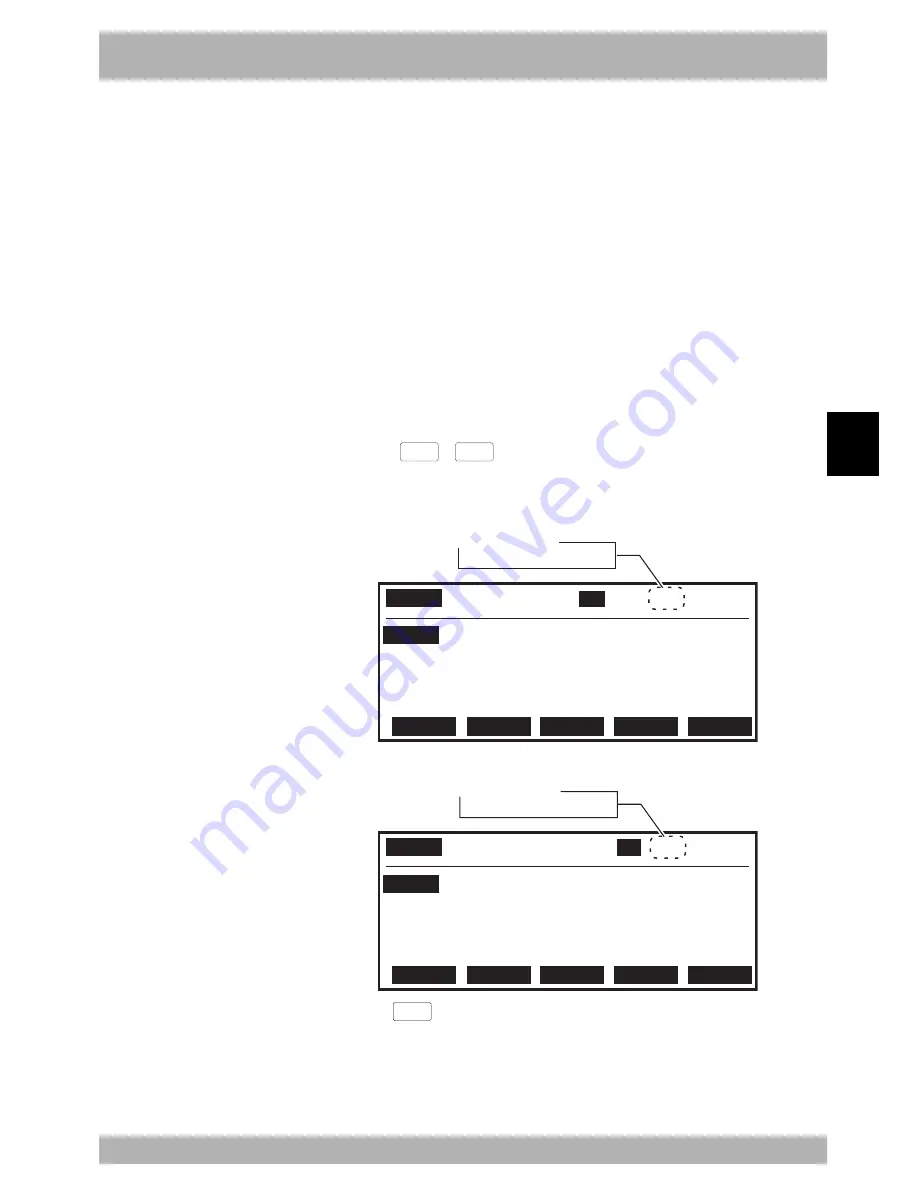
Fig. 5-2-17 Pallet definition setting (Two-robot setting: Main group selected)
MANUAL
>PALLET
50
/ 50%[MG][S0H0X]
PL0
=
PL1
=
PL2 =
PL3 =
[POS] 0.00 0.00 0.00
0.00
EDIT
METHOD
VEL+
VEL-
Subject group display
MG (Main group is selected)
Fig. 5-2-18 Pallet definition setting (Two-robot setting: Sub group selected)
MANUAL
>PALLET
50
%[SG][S0H4X]
50/
PL0
=
PL1
=
PL2 =
PL3 =
[POS] 0.00 0.00 0.00
0.00
EDIT
METHOD
VEL+
VEL-
Subject group display
SG (Sub group is selected)
3) Press the
F 2
(METHOD) key, then, in the "MANUAL>PALLET>SET" mode,
set the pallet definition.
n
NOTE
For details concerning Setting the
point in pallet definition by teaching,
also see "11.3.1.1.2 Setting the point in
pallet definition by teaching" in
Chapter 4.
n
NOTE
• For details concerning inputs by
pallet definition setting, also see
"11.3.2 Pallet definition by
teaching" in Chapter 4.
• When return-to-origin is
incomplete, the points in pallet
definition setting cannot be input
by teaching. Always perform
absolute reset and then teach the
points.
w
WARNING
When moving the robot for pallet
definition setting, do not enter
the robot movement range to
avoid danger.
Содержание RCX142
Страница 1: ...User s Manual ENGLISH E YAMAHA 4 AXIS ROBOT CONTROLLER E92 Ver 1 09 RCX142 ...
Страница 2: ......
Страница 18: ...MEMO ...
Страница 24: ...1 6 MEMO ...
Страница 26: ...MEMO ...
Страница 36: ...MEMO ...
Страница 300: ...4 238 MEMO ...
Страница 302: ...MEMO ...
Страница 336: ...MEMO ...
Страница 360: ...6 24 MEMO ...
Страница 362: ...MEMO ...
Страница 374: ...MEMO ...
Страница 384: ...8 10 MEMO ...
Страница 386: ...MEMO ...
Страница 394: ...MEMO ...