





























4-
55
4
Operation
10. “PROGRAM” mode
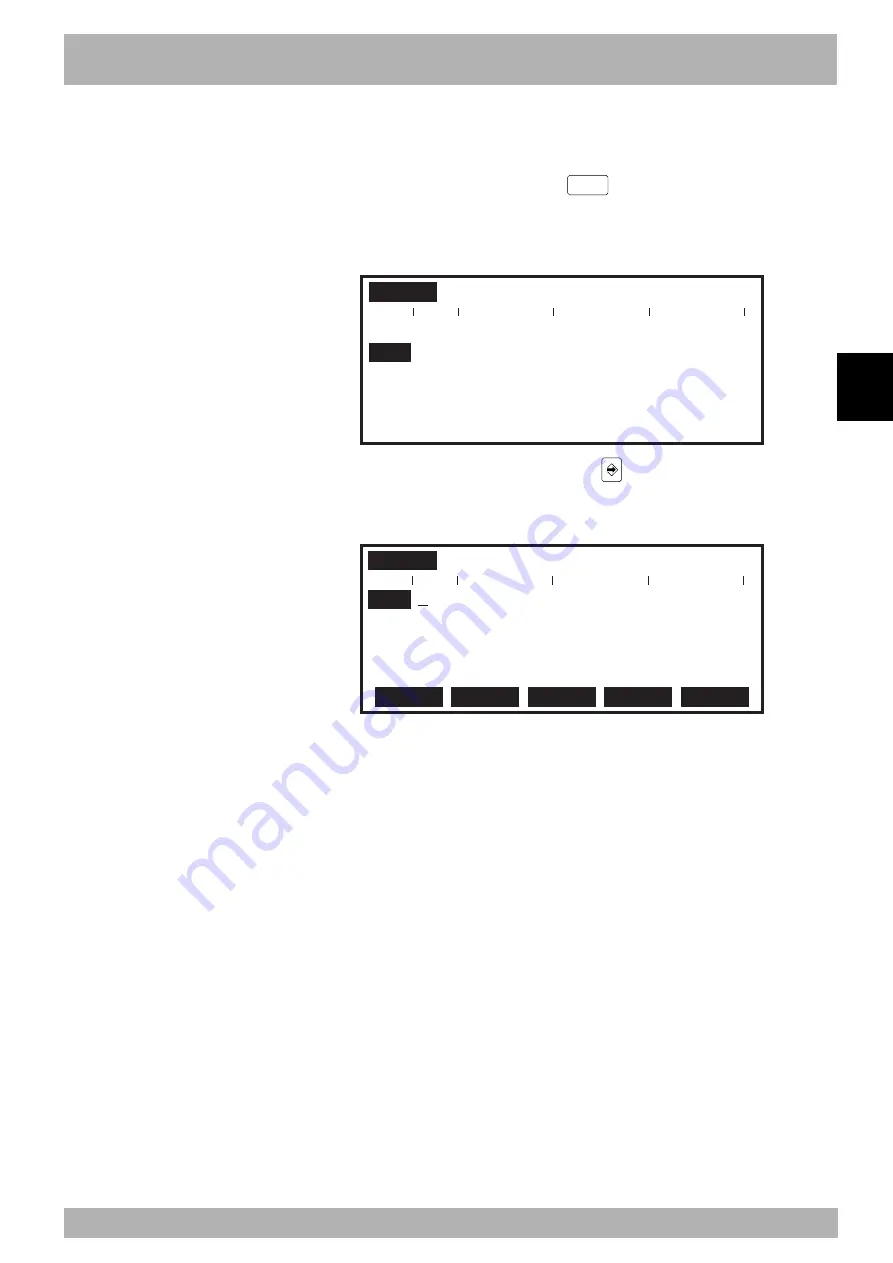
10.2.13 Line jump
[Procedure]
1) In “PROGRAM>EDIT” mode, press the
F 6
(JUMP) key to enter
“PROGRAM>EDIT>JUMP” mode.
The message “Enter line no. > “ appears on the guideline.
Fig. 4-10-13 Line jump
PROGRAM
>EDIT
<TEST2 >
1 ’***** TEST2 PROGRAM *****
2
GOTO *_’
3 DO2(0)=0
4 WAIT DI3(4,3,2)=3
5 MOVE P,P0 ’ORIGIN
Enter line no. >45_
———————————————————————————————————————————
1
2
3
2) Enter the line number to jump to and press the
key.
The program is then displayed from the specified line.
Fig. 4-10-14 Performing line jump
PROGRAM
>EDIT <TEST2
>
45
RESET DO3(4)
46 DELAY 1000
47 A=4
48 GOTO *T4
49 *T5:
SELECT
COPY
CUT
PASTE
BS
———————————————————————————————————————————
1
2
3
Содержание RCX141
Страница 1: ...User s Manual ENGLISH E YAMAHA 4 AXIS ROBOT CONTROLLER E93 Ver 2 02 RCX141 ...
Страница 2: ......
Страница 16: ...viii MEMO ...
Страница 18: ...MEMO ...
Страница 24: ...1 6 MEMO ...
Страница 26: ...MEMO ...
Страница 34: ...2 8 MEMO ...
Страница 36: ...MEMO ...
Страница 54: ...3 18 MEMO ...
Страница 290: ...4 232 MEMO ...
Страница 292: ...MEMO ...
Страница 316: ...5 24 MEMO ...
Страница 318: ...MEMO ...
Страница 326: ...6 8 MEMO ...
Страница 328: ...MEMO ...
Страница 338: ...7 10 MEMO ...
Страница 340: ...MEMO ...
Страница 346: ...MEMO ...
Страница 401: ...MEMO ...







































































