





























4-
125
4
Operation
11. “MANUAL” mode
11.8 Return-to-origin
After the power to the controller is turned on, return-to-origin must be performed before
starting robot operation. When return-to-origin is performed, the robot arms move to their
mechanical origin positions and the position data in the controller is reset.
Return-to-origin must be performed on incremental mode axes. On semi-absolute mode
axes, an absolute search (also called absolute reset) is performed by return-to-origin
operation (see 11.8.2).
The following parameters are for return-to-origin operation. For more details on each
parameter, refer to items described in "12.1 Parameters" of chapter 4.
Category
Robot parameter
Axis parameter
Parameter name
Origin sequence
Origin speed
Origin shift
Origin method
Origin direction
Description
Sets the order in which to perform return-to-
origin or absolute search on each axis.
Sets the speed at which to perform return-to-
origin or absolute search.
Sets the offset of origin position data.
Sets the method for performing return-to-origin
or absolute search.
Sets the direction for performing return-to-origin
or absolute search.
11.8.1
Return-to-origin operation
Return-to-origin methods include the sensor method and stroke end detection method.
Each return-to-origin method is described below.
Refer to "11.8.3 Return-to-origin procedure" for instructions on how to perform return-
to-origin.
●
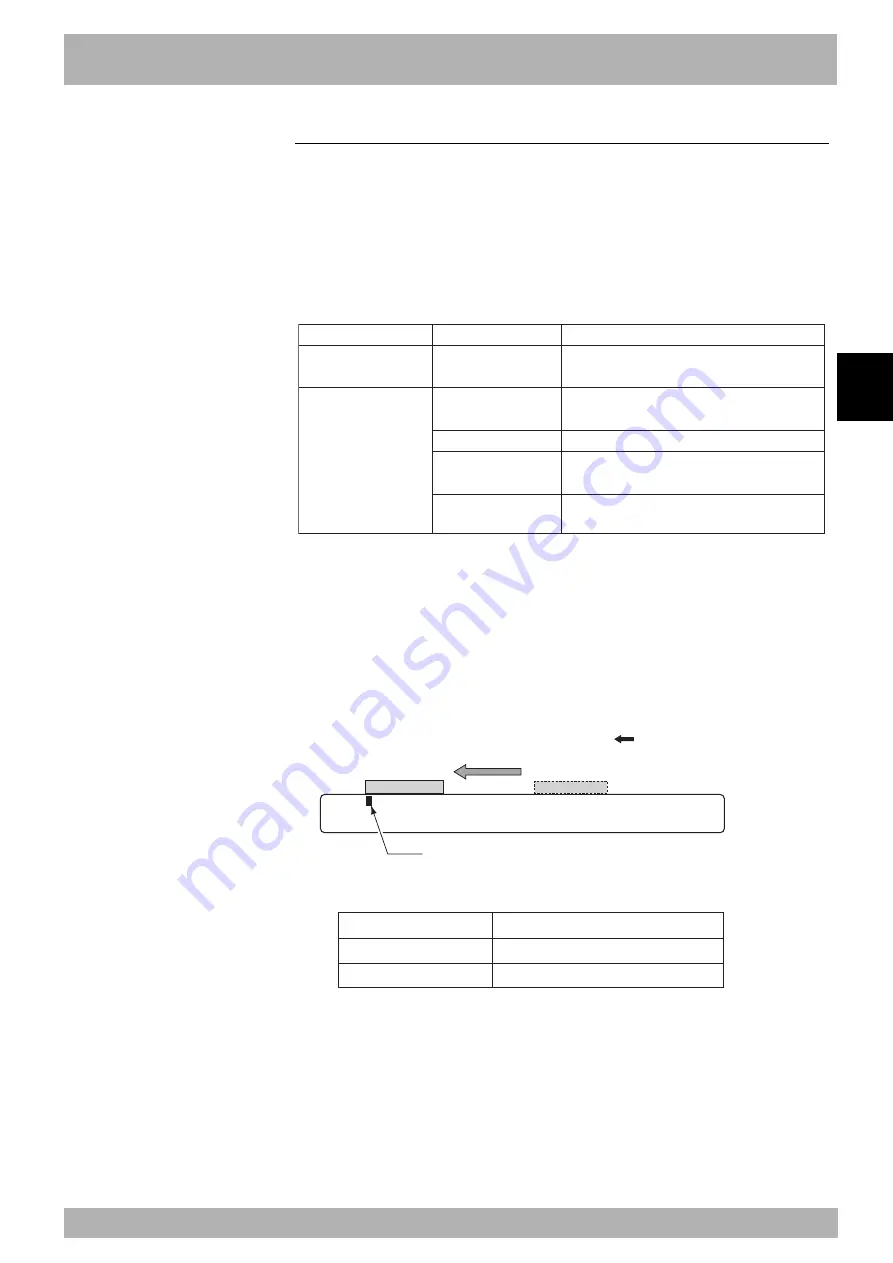
Return-to-origin operation using the sensor method
Fig. 4-11-81
Return-to-origin direction
q
e
w
Return-to-origin start position
Origin sensor
q
Before performing return-to-origin, check that all axes are in positions that allow
return-to-origin.
Return-to-origin direction
Minus (-) direction
Plus (+) direction
Position allowing return-to-origin
Plus (+) side from origin sensor position
Minus (-) side from origin sensor position
w
Upon starting return-to-origin, the robot starts moving in the return-to-origin
direction.
However, if the origin sensor was on when return-to-origin was started, then the
robot first moves in a direction opposite the return-to-origin direction. Then, when
the origin sensor turns off, the robot stops and restarts return-to-origin from that
position.
e
After the origin sensor turns on, the robot stops and the origin position is then
found. At this point, the position where the robot stopped is set as an origin shift
parameter value.
n
NOTE
In the sensor method, if return-to-
origin is started with the origin sensor
turned on and continues without the
origin sensor being turned off, then an
error "17.21 Bad origin sensor" will
occur.
Содержание RCX141
Страница 1: ...User s Manual ENGLISH E YAMAHA 4 AXIS ROBOT CONTROLLER E93 Ver 2 02 RCX141 ...
Страница 2: ......
Страница 16: ...viii MEMO ...
Страница 18: ...MEMO ...
Страница 24: ...1 6 MEMO ...
Страница 26: ...MEMO ...
Страница 34: ...2 8 MEMO ...
Страница 36: ...MEMO ...
Страница 54: ...3 18 MEMO ...
Страница 290: ...4 232 MEMO ...
Страница 292: ...MEMO ...
Страница 316: ...5 24 MEMO ...
Страница 318: ...MEMO ...
Страница 326: ...6 8 MEMO ...
Страница 328: ...MEMO ...
Страница 338: ...7 10 MEMO ...
Страница 340: ...MEMO ...
Страница 346: ...MEMO ...
Страница 401: ...MEMO ...







































































