





























66
5.3.1.3 Positioning near signal (/NEAR)
The servo motor is located near the positioning completion signal, so that the equipment can prepare
the next action in advance.
Related parameters
Parameter
Meaning
Default
setting
Unit
Range
Change
Effective
P5-06
Near signal output
width
50
Command
unit
0
~
65535
Anytime
At once
Parameter
Signal
name
Default
setting
Suitable
mode
Meaning
Modify
Effective
P5-46
/NEAR
n.0000
All
Positioning near
Anytime
At once
Refer to section 3.2.2 for hardware wiring details.
If it is necessary to output from the SO2, P5-46 can be set to n.0002/0012.
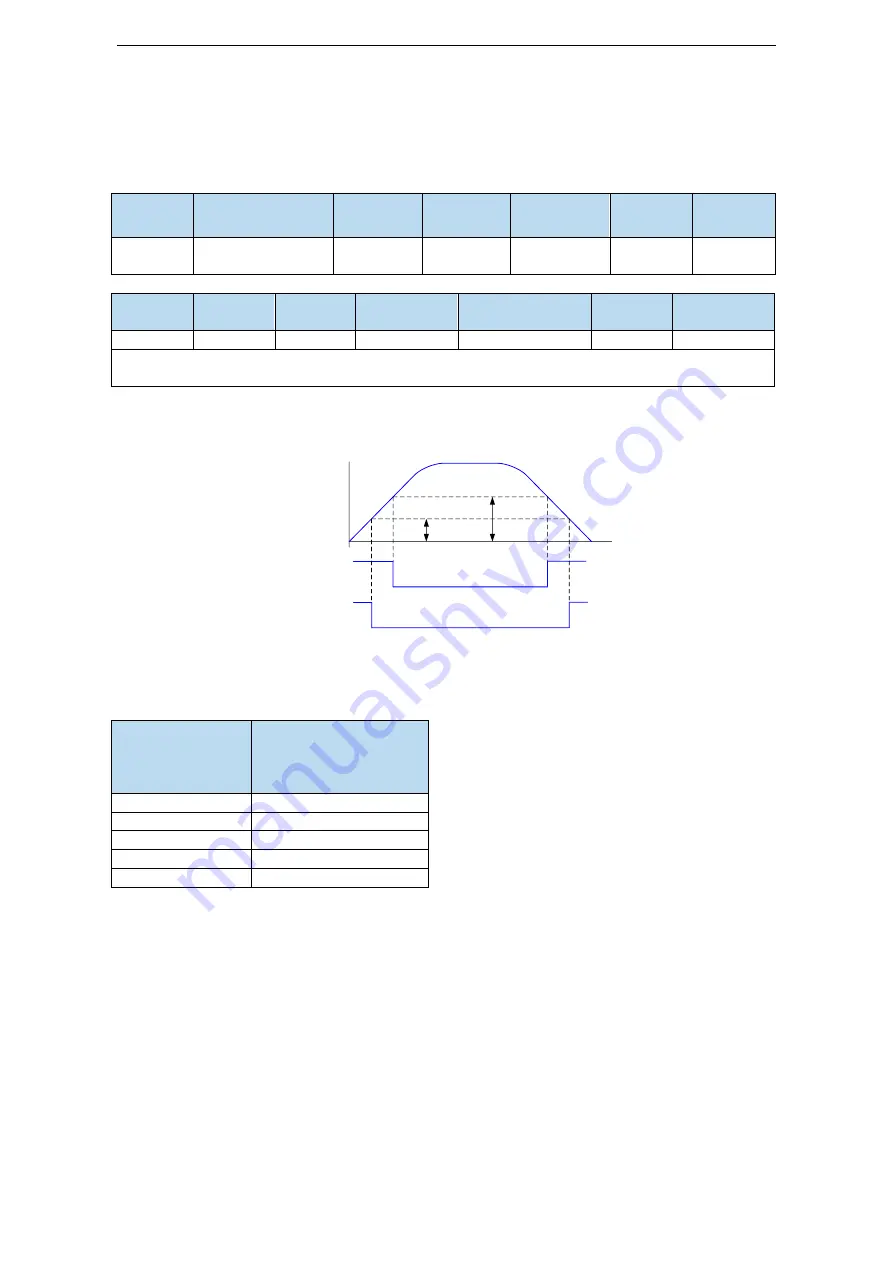
1. Positioning approach signal output conditions
When the pulse deviation value U0-08 of the servo driver is lower than the P5-06 setting value,
the positioning approach signal (/NEAR) is output.
U0-08
Pulse offset
/COIN
signal status
ON
/NEAR
signal status
ON
ON
ON
OFF
OFF
P5-00
P5-06
2. Description of approach signal output
(1) The approach signal output width P5-06 changes proportionally due to the change of the electronic
gear ratio. The default setting is 11 command units.
The following table is an example:
Number of
command pulses
required for one
revolution of motor
Near signal output width
P5-06
The near signal output width P5-06 changes
proportionally with the number of command pulses
required for one revolution of the motor.
The output of the positioning completion signal
depends on the positioning completion width. The
smaller the width is, the later the positioning
completion signal output is, but the signal output
does not affect the actual operation state of the
motor.
10000 (default)
50 (default)
20000
100
5000
25
3000
15
2000
10
(2) The approach signal output width can also be set independently, and its change will not affect
the number of command pulses required for one revolution of the motor.
(3) Please set this parameter larger than the positioning completion width.
Содержание DS5F Series
Страница 1: ...DS5F series servo driver User manual WUXI XINJE ELECTRIC CO LTD Data No SC5 02 20200217 2 3 ...
Страница 2: ......
Страница 41: ...39 3 2 5 Encoder feedback output signal Servo driver differential to collector upper device ...
Страница 124: ...122 2 select jog setting or manual setting to configure the inertia estimation trip 3 Set the auto tuning interface ...
Страница 202: ...200 Appendix 9 Torque speed characteristic curve ...
Страница 203: ...201 ...
Страница 204: ...202 ...







































































