





























55
after stopping.
Note:
(1) P0-27 / P0-29 = 0, inertia stops, and maintains inertia operation state after stopping.
When the servo is off and the alarm occurs, the motor starts to stop by inertia until the speed is less
than P5-03, and then it turns to free stop. The servo will time the inertia stop process. In the process of
inertia stop, if the timing time has been greater than P0-30, and the motor speed has not dropped below
P5-03, the servo will directly free stop, and give the stop timeout alarm E-262.
(2) P0-27 / P0-29 = 2, deceleration braking stops, and maintains inertia operation state after stopping.
When servo off and alarm occur, the motor will generate a braking torque of P3-32. The motor will
start braking and stop until the speed is less than P5-03 (rotation detection speed), and then it will turn
to free stop. At the same time, the servo will timing the braking stop process. In the process of inertia
stop, if the timing time has been greater than P0-30, and the motor speed has not dropped below P5-03,
the servo will directly free stop, and give the stop timeout alarm E-262.
(3) The so terminal of servo driver is equipped with holding brake function. No matter P0-27 / P0-29 =
0 or 2, it stops in deceleration mode.
(2) Stop mode in case of over travel
The overtravel prevention function of servo unit refers to the safety function that the servo motor
is forced to stop by inputting the signal of limit switch when the movable part of the machine exceeds
the designed safe moving range.
Related parameter
parameter
Meaning
Default
setting
Unit
Setting
range
Modify
Effective
P0-28
Servo override stop
mode
2
-
0
~
3
Servo bb
At once
P0-30
Stop timeout
20000
1ms
0
~
65535
Servo bb
At once
P3-32
Braking torque
300
1%
0
~
1000
Anytime
At once
P5-22
Forward run
prohibition /P-OT
n.0003
-
Anytime
At once
P5-23
Reverse run
prohibition /N-OT
n.0000
-
Anytime
At once
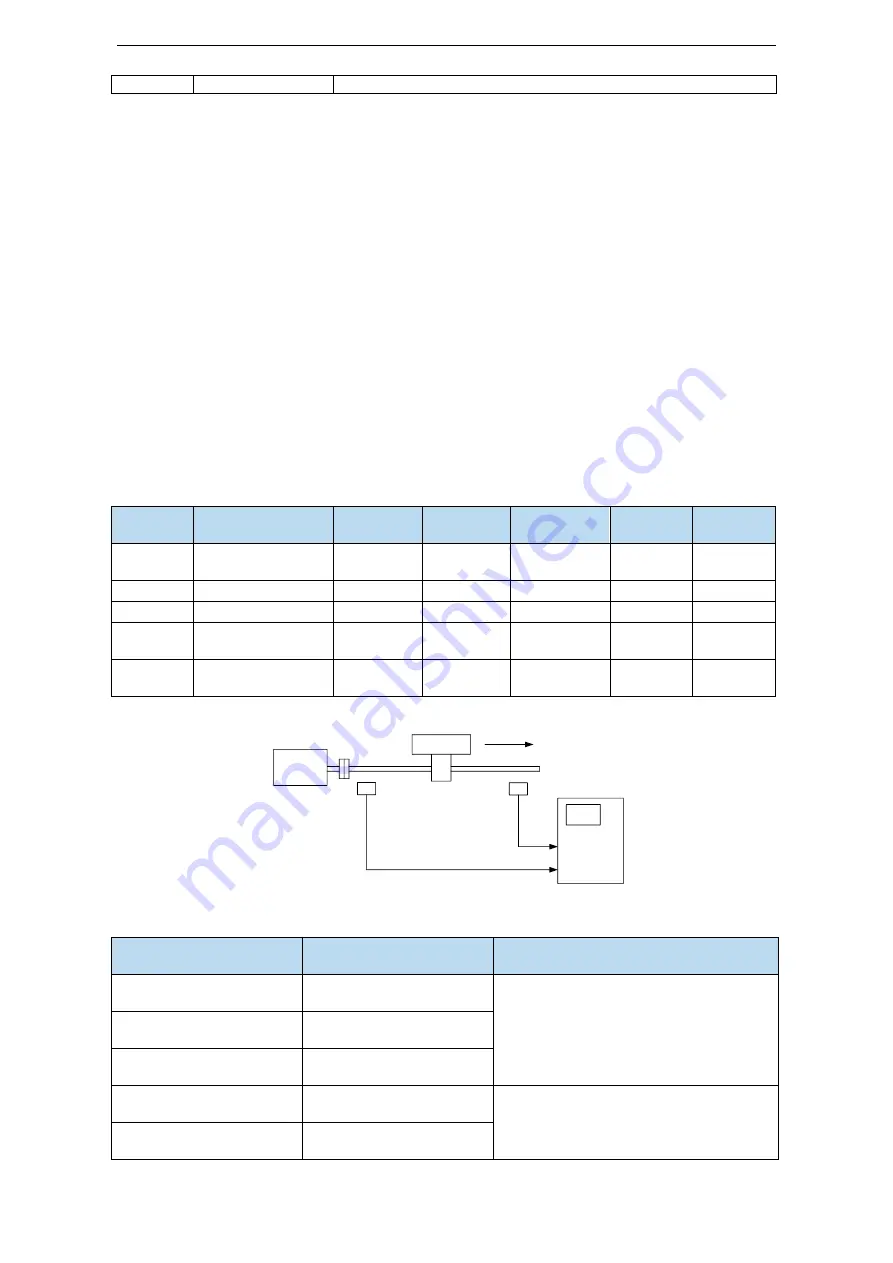
Be sure to connect the limit switch as shown in the figure below.
CN0
SI3
SI4
Servo
motor
Limit
switch
Limit
switch
POT
NOT
Motor forward
direction
Servo unit
Rotary applications such as round tables and conveyors do not need the function of overrun prevention.
At this time, there is no need to connect the overrun prevention with input signals.
Parameter setting
Signal /POT, terminal
input status
Overtravel signal (/POT, /NOT) terminal
logic
P5-22/P5-23=n.0000
No need to connect
external input
invalid
P5-22/P5-23=n.000□
SI□ terminal has no signal
input
P5-22/P5-23=n.001□
SI□ terminal has signal
input
P5-22/P5-23=n.0010
No need to connect
external input
valid
P5-22/P5-23=n.000□
SI□ terminal has signal
input
Содержание DS5F Series
Страница 1: ...DS5F series servo driver User manual WUXI XINJE ELECTRIC CO LTD Data No SC5 02 20200217 2 3 ...
Страница 2: ......
Страница 41: ...39 3 2 5 Encoder feedback output signal Servo driver differential to collector upper device ...
Страница 124: ...122 2 select jog setting or manual setting to configure the inertia estimation trip 3 Set the auto tuning interface ...
Страница 202: ...200 Appendix 9 Torque speed characteristic curve ...
Страница 203: ...201 ...
Страница 204: ...202 ...







































































